The Batmobile Projects
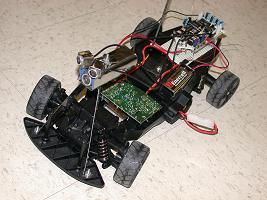
Right Photo:
MERIT 2003: Patrick Knapp (Syracuse University) and Jesse
Clarke (University of Maryland) - MERIT Fair Best Project Award - RITE
Category
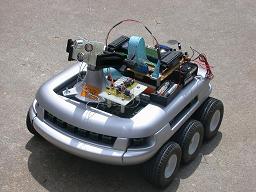
Left Photo: MERIT
2004: Gaurav Singhal (Columbia University) and Marshall Miller
(University of Maryland) - MERIT Fair Best Project Award - RITE Category
The Batmobile projects are two efforts in our laboratory to explore
neurally-plausible algorithms for the control of steering based on
bat-like echolocation. Unlike many sonar approaches in the mobile
robotics literature, most bats do not appear to estimate echo azimuth
based on the time of flight between two widely-spaced
microphones. This is probably due to its small head and
thus the very short time of flight between the two ears (max time of
flight ~ 70us). Instead, azimuth is estimated from the relative
intensities of an echo at the two ears. At the ultrasonic
frequencies that bats use, the head creates an angle-dependent
attenuation.
While one can buy Polaroid sonar ranging modules to report the closest
object that reflects a sonar ping, much more information is available
from the echoes from all objects in the near field. The sonar we
are working with uses a single transmitter and two receivers which have
directional-sensitivity curves that allow intensity comparisons between
the two "ears".
In the MERIT 2003 project,
information about an obstacle's range and azimuth were combined using a
torque summation model where obstacles effectively "nudged" the robot
to turn away. This approach was inspired by work by Bill Warren's
laboratory at Brown University on human walking patterns. While
fairly effective as a basic reflex-like maneuver, many aspects of the
approach did not produce desirable effects. The classic reflexive
robot trap is to send it into the corner of the room.
Nonetheless, we were able to demonstrate some relatively rapid decision
making based on multiple obstacles.
- movie:
DSCN2825.AVI
- movie: DSCN2834.AVI
- movie: DSCN2837.AVI
- movie: DSCN2839.AVI
- movie: DSCN2841.AVI
- movie: batmobile_2_003.avi
- movie: batmobile_2_005.avi
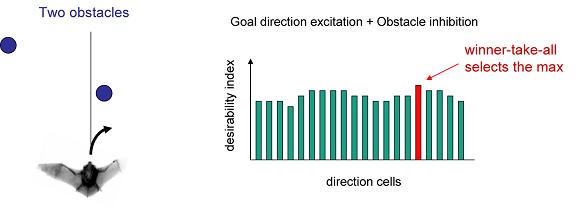
In the MERIT 2004 project, we
explored a new approach that we called 'Openspace'. The openspace
algorithm was a 'hypothesis' testing approach which evaluated the merit
of each possible direction, reducing the desirability of certain
directions when an obstacle was detected. The best direction
following this evaluation was selected and the robot turned towards
this direction. This algorithm was successful in three main ways:
1) the robot could select directions to turn towards, even if it meant steering initially towards another obstacle, 2) the robot tends to steer towards the center of an opening between two obstacles, and 3)
goal information and obstacle information can be combined in a common
data representation. We have tested this new algorithm on a Koala
mobile robot (K-Team, Switzerland). None of the built-in sensors
on the Koala were used.
- movie: DSCN4049_s.avi - Koala robot cuts across the forest of 'trees' (3 MB)
- movie: DSCN4050_s.avi - Koala robot steer through a corridor of 'trees' (3.5 MB)
- movie: DSCN4052_s.avi - Steering around a tree trunk (3.9 MB)
- movie: DSCN4057_s.avi - Off road travel (6.1 MB)
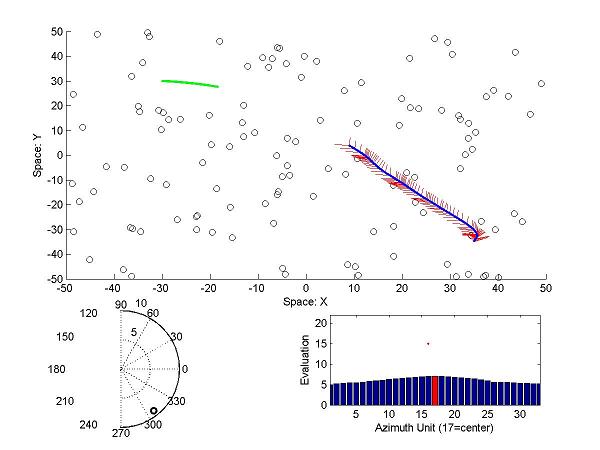
In MATLAB simulations, we have
been exploring many other aspects of the algorithm and testing new
concepts of merging information about goals and obstacles, including
swarms of bats.
- movie : MATLAB simulation of a bat flying through a forest. - os6_05.avi (3.3 MB)
- movie : MATLAB simulation of a bat flying through a forest with variable repetition rate. - os7_06.avi (2.1 MB)
- movie : MATLAB simulation of 8 bats : each has a tendency to fly behind another - mbat06_07.avi (2.3 MB)