News Story
Optimal control and strong interactions imply flock cohesion
New work suggests that copying behavior in social groups may be governed by optimal control theory
 Nature has provided herding animals and flocking birds with abilities to react to predator attacks and to sense risky features in their environment— like trees or cliffs—that might impede their defense. But how do these abilities work? What’s going on inside individual animals and the group as a whole as they protect themselves with coordinated movements?
Nature has provided herding animals and flocking birds with abilities to react to predator attacks and to sense risky features in their environment— like trees or cliffs—that might impede their defense. But how do these abilities work? What’s going on inside individual animals and the group as a whole as they protect themselves with coordinated movements?
New research by a University of Maryland alumnus and faculty member published in the current issue of the Proceedings of the Royal Society A explores how an avoidance signal from a single animal closest to the danger can quickly spread through the collective. The researchers developed mathematical models of optimal control that capture imitative behavior in a collective as if a “master clock” governs all group members.
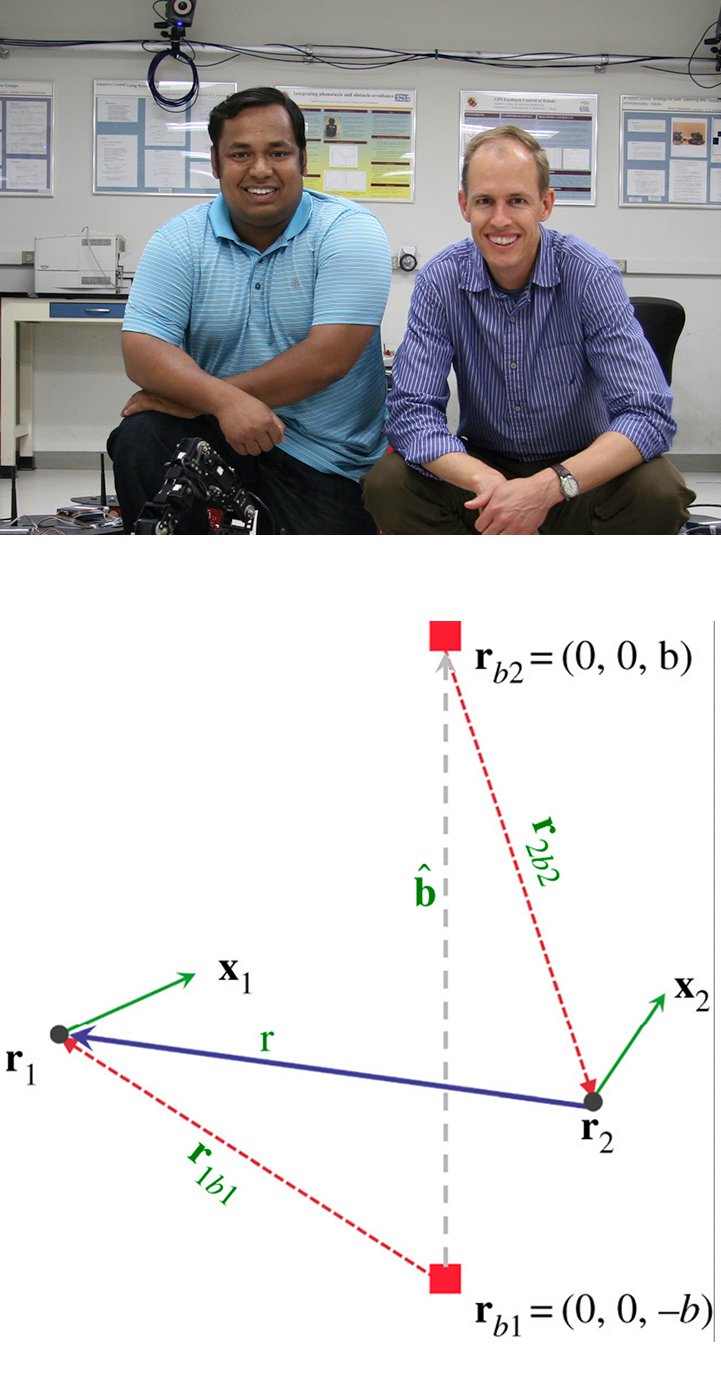
"Optimality, reduction and collective motion" (RSPA 20140606) was written by University of Maryland alumnus Eric Justh (EE Ph.D. 1998), Electronics Engineer at the Naval Research Laboratory; and Professor P. S. Krishnaprasad (ECE/ISR).
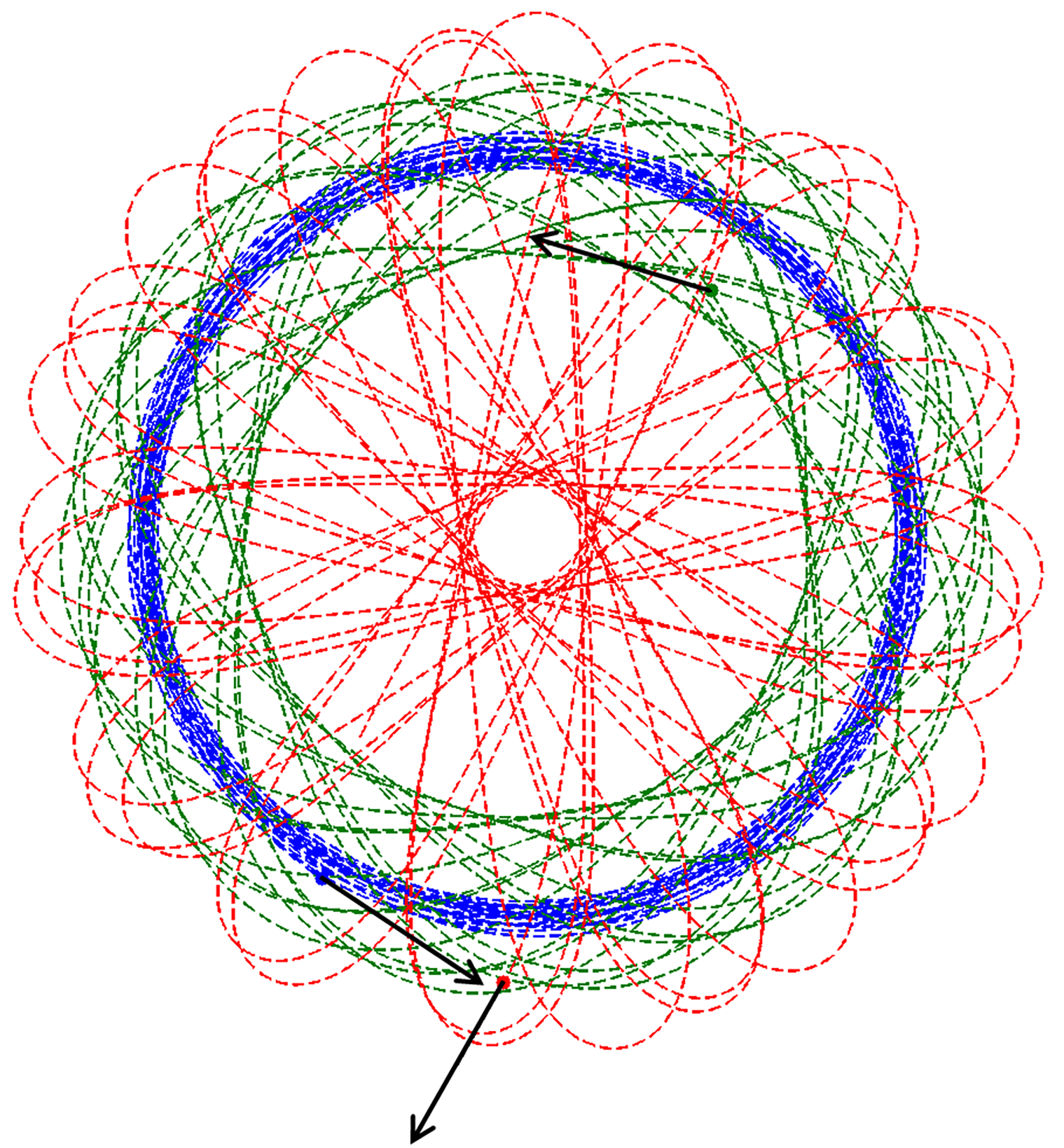
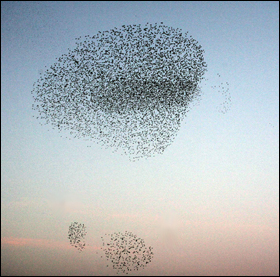
“The nearly-in-unison movement of a herd of animals away from danger may be the result of rapid transfer of information in a collective,” says Krishnaprasad. “An individual close to danger senses it and signals avoidance to others through an action such as turning. Signals need to propagate, and in this case, the flock itself is the medium through which such information spreads in a wave of activity arising from an optimality principle.”
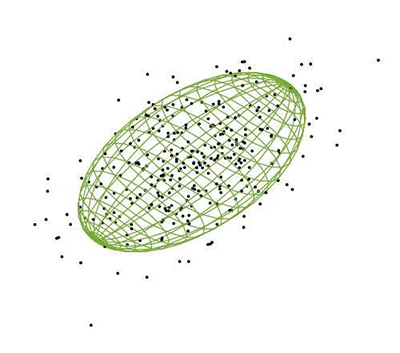
When engineers and biologists make models of flocks, they envision them as composed of individual agents (self-steering particles) with free will to control actions such as turning or escape based on perceptual feedback—what they sense is going on in the environment. A collaborator in Italy—Dr. Andrea Cavagna—shared three-dimensional position data from observations of large flocks of European starlings (numbering in the hundreds) displaying striking flight behavior. His team’s analysis of the data investigates information transfer in a flock using Hamilton’s equations arising from the application of statistical physics principles. The Maryland team formulated an optimal control problem for flocking and derived Hamilton’s equations based on principles of optimality associated with Pontryagin and others.
“We have already used optimal control principles in solving inverse problems such as reconstructing smooth trajectories from sampled data of natural flocks,” says Krishnaprasad. “We expect insights from optimal control could yield testable predictions on information transfer in some flocking events. This is work in progress.”
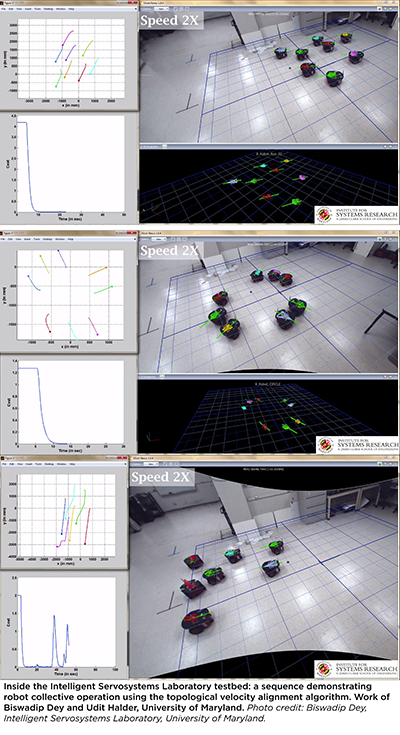
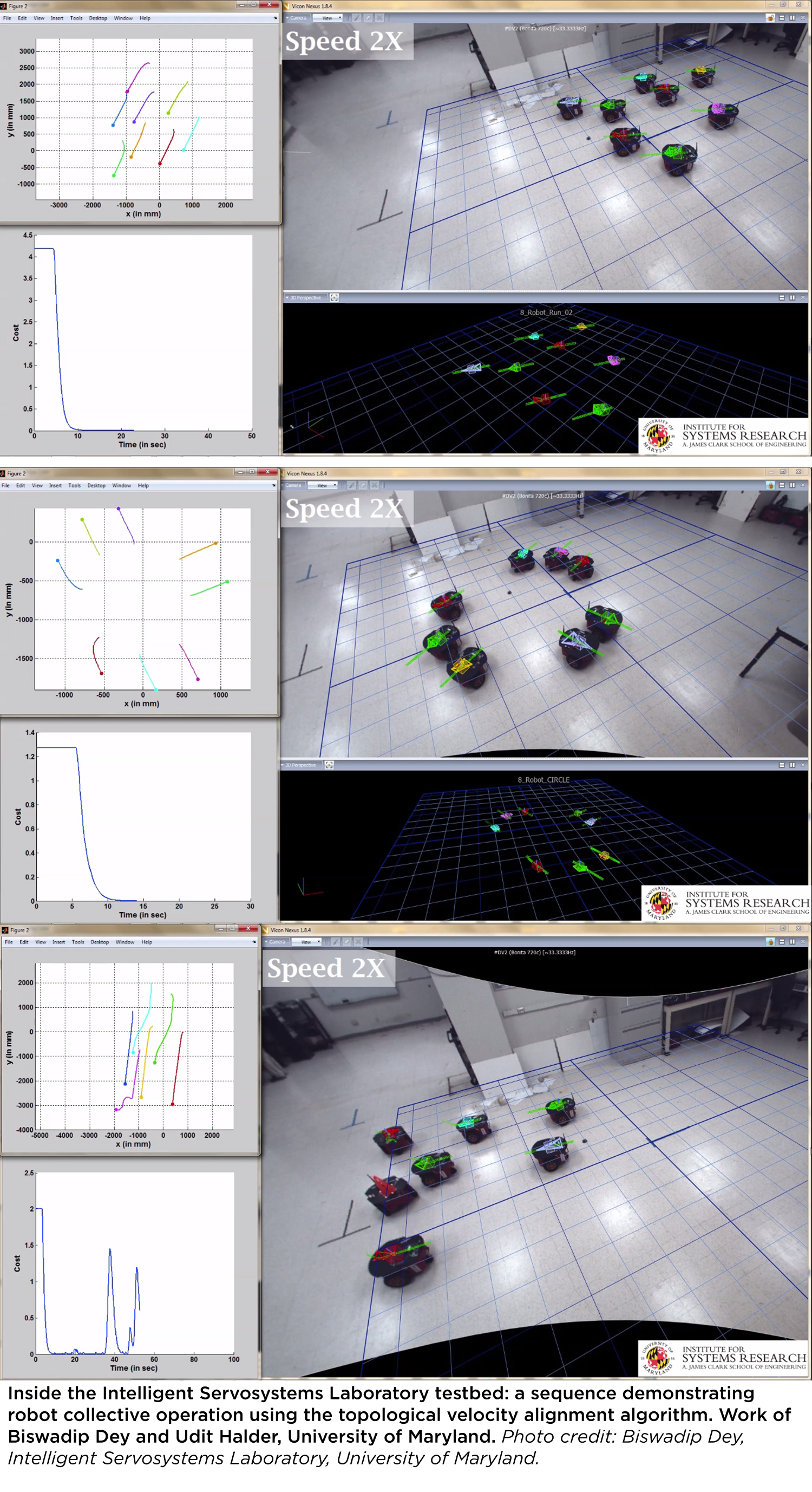
These insights from the study of nature have practical implications. For example, they can be used to devise algorithms for collective behavior in robotics. Justh and Krishnaprasad’s findings may lead to the creation of new algorithms for networked robots to work together on tasks such as vigilance. Recent work in the Intelligent Servosystems Laboratory is pursuing these avenues of research.
- - - - - - - - - - -
The work of P. S. Krishnaprasad was supported in part by the Air Force Office of Scientific Research under AFOSR grant no. FA9550-10-1-0250, and the ARL/ARO MURI programme grant no. W911NF-13-1-0390. The work of Eric Justh was supported by the Office of Naval Research.
- - - - - - - - - - -
For more information
Online paper
"Optimality, reduction and collective motion," Proceedings of the Royal Society A (subscription may be required for full text)
Image
High-res image of the robot collective operation sequence
{kind=link}
Work of P. S. Krishnaprasad
For a number of years, Dr. Krishnaprasad has been working with students to demonstrate motion control software tools on mobile robots in the University of Maryland’s Intelligent Servosystems Laboratory. The laboratory is equipped with a testbed that uses motion capture technology to explore ideas and algorithms in cooperative autonomous robots. Learn more about Dr. Krishnaprasad’s work in the research section of his website.
Videos
Examples of wave phenomena in starling flocks may be found in the following two videos on YouTube.
Starling flocks near Oxford, England, from the website keepturningleft.co.uk
More than 60,000 starlings in flight, filmed by Tuur Hofman in March 2011 near Utrecht, Netherlands
Published April 2, 2015
Related Stories
Stories / November 9, 2016
Small collectives and nonlinear dynamics
Stories / August 17, 2013
Galloway, Justh, Krishnaprasad publish chasing and flocking...

Stories / March 8, 2023
The Falcon and the Flock

Stories / May 6, 2020
ISR/ECE alumni collaborate on control paper published in PRS-A
Stories / April 26, 2017
Flocks and Form
Stories / December 12, 2014
Workshop on Geometry of Collective Behavior organized by P. S....

Stories / July 2, 2012
Krishnaprasad awarded AFOSR DURIP for collective behavior...
Stories / May 2, 2012
Krishnaprasad delivers Princeton Baetjer Colloquium lecture
Stories / October 5, 2010
Krishnaprasad, Cavagna begin new AFOSR collective behavior...
Stories / March 13, 2024
Balachandran, Cameron, Yu Receive 2024 MURI Award
