News Story
Bergbreiter wins 2008 DARPA Young Faculty Award
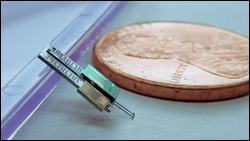
A model of an autonomous jumping robot, with a penny for scale. Photo by Sarah Bergbreiter.
Bergbreiter's research is titled, "Silicon/Elastomer Components for Autonomous Jumping Microrobots."
The research will develop the mechanisms necessary to build a robust autonomous jumping microrobot. Jumping offers numerous benefits to millimeter-sized robots. As the robot size shrinks, obstacles around the robot grow comparatively larger and jumping provides a relatively simple mechanical means of dealing with those obstacles. Ultra low power parasitic locomotion, in which the microrobot uses other objects moving nearby to provide the locomotion power, becomes feasible when the microrobot can jump on and jump off.
For basic functionality, a jumping microrobot benefits from its relative simplicity. It requires only a motor, an energy storage element to store and quickly release mechanical energy for a jump, a controller, and a power supply. However, while the robot itself is fairly simple, the components have performance requirements above those offered by current technologies.
To achieve the performance and robustness necessary to make this vision feasible, microrobot mechanisms such as motors and springs will be fabricated in a silicon/elastomer process. Specifically, this process will add an elastomer like PDMS into a standard SOI MEMS process to improve motor force density and spring performance to the point at which the robot will be able to store and release enough energy to jump 10s of centimeters. The silicon/elastomer process will also add robustness so that the robot will be able to land and jump again.
Published April 1, 2008
Recent Stories
Stories / Apr 10, 2024
UMD Launches Institute Focused on Ethical AI Development
Stories / Mar 27, 2024
Remembering Rance Cleaveland (1961-2024)

Stories / Mar 22, 2024
Dinesh Manocha Inducted into IEEE VGTC Virtual Reality Academy

Stories / Mar 21, 2024
ECE Ph.D. Student Ayooluwa (“Ayo”) Ajiboye Recognized at...

Stories / Mar 13, 2024
Balachandran, Cameron, Yu Receive 2024 MURI Award

Stories / Mar 11, 2024
UMD, Booz Allen Hamilton Announce Collaboration with MMEC
Stories / Feb 21, 2024
New Research Suggests Gossip “Not Always a Bad Thing”

Stories / Feb 19, 2024
Ingestible Capsule Technology Research on Front Cover of Journal
Stories / Feb 5, 2024
Governor’s Cabinet Meeting Features Peek into Southern...

Stories / Feb 1, 2024
Celebrating the Impact of Black Maryland Engineers and Leaders