[ Project 1 ]:
Assessment of Task Completion for Robots Playing Soccer
[ Project 2 ]:
Validation and Verification of a Railway Temporary Speed Restriction System
[ Project 3 ]:
System, Requirement, and Component Ontology Modeling
[ Project 4 ]:
Reliability Analysis of Electric Power Systems for More-Electric Aircraft
[ Project 5 ]:
Platform Design for Commercial Distribution of Rail Vehicle Generated Power
[ Project 6 ]:
Sensor-driven Airport Taxiway and Runway Control
[ Project 7 ]:
Verification and Validation of a Five-Axis CNC Milling Center
[ Project 8 ]:
Ontology and Rule-Based Modeling of City Connectedness
[ Project 9 ]:
A Single Tool for Small Systems Engineering Teams
[ Project 10 ]:
Co-Simulation of Smart Grid Compatible Residential Facilities
[ Project 11 ]:
Air Traffic Collision Avoidance System (TCAS) for Unmanned Aircraft operating
[ Project 12 ]:
Using UPPAAL to Verify Behavior of a Hypernetwork and Hypergraph Model of Baseball
[ Project 13 ]:
Verification and Validation Methods for a Tactile Sensing Skin System
[ Project 14 ]:
Verification and Validation of RS232 Standard
[ Project 15 ]:
Automated Validation of Textual Requirements through Natural Language Processing
[ Project 16 ]:
Powering Human Body Sensor Nodes with Microgenerators
[ Project 17 ]:
Formal Verification of Wastewater Treatment Processes
Title: Assessment of Task Completion for Robots Playing Soccer
Author: Lydia Mattern
Abstract: RoboCup is a soccer league where teams composed of autonomous cooperative robots compete in dynamic adversarial environments. Soccer is a time-driven competitive game where the opponent is unpredictable. This creates a challenge to ensure that the multi-agent system can work on both an individual level and that of a cohesive unit. Validating and verifying the robot team is important to ensure that they are able to adequately compete against other teams.
This semester, I will work to formally assess whether tasks will work using UPPAAL in hopes to verify the logic and potentially improve upon or choose between strategies.
References
Midterm Presentation: Scheduled for November 5.
Class Presentation: Scheduled for December 3.
Title: Validation and Verification of a Railway Temporary Speed Restriction System
Author: Ruiqi (Iris) Mu
Abstract: Temporary Speed Restriction (TSR) restricts the speed limit on a segment of the railway between point A and point B. Temporary Speed Restriction Server (TSRS) is a device that manages the TSR in order to satisfy the requirement of the Communication Based Train Control System (CBTC). For most of the railway lines in the world, the Centralized Train Control (CTC) system is still in charge of the speed limit controls. But in some countries, the CTC is too busy to manage millions of temporary speed limit commands every day for the entire big train control system, as the speed of train increases up to 350KM/h. Hence, the TSRS has been divided from the CTC and placed into use. Several types of TSRS are developed by different companies around the world.
In this project, I will focus on the V-V test for the functions of TSRS made by a French company. The data is based on one segment of the railway in China.
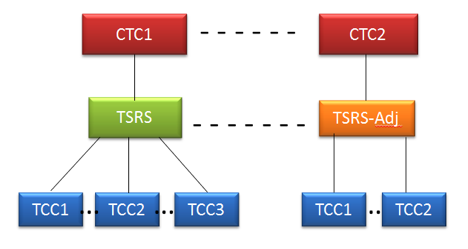
Figure 1. Structure of the Testing System for TSRS.
Figure 1 shows the structure of the testing system for TSRS -- it consists of CTC, TSRS and TCC. The Centralized Train Control system (CTC) controls the whole railway operations. The Train Control Center (TCC) is located in the stations and controlled by CTC. TSRS-Adj, is the TSRS that placed in the station adjacent to the station of the “local TSRS”. “Local TSRS”, which is also a TSRS in the schematic, is being tested. Lines in the schematic indicate that there are communication data exchanges between the devices.
Note: The device that being tested is only local “TSRS”. Other devices shown in the schematic are the environment for the test.
References
Midterm Presentation: Scheduled for November 5.
Class Presentation: Scheduled for December 3.
Title: System, Requirement, and Component Ontology Modeling
Author: Peter Linnehan
Abstract: System requirements and specifications provide the foundation for any systems engineering project. The requirements come directly from the customer’s needs and are used as the primary point of reference (both legally and functionally) during system design. Thus, the generation and verification of a system engineering project’s requirements is of the utmost importance. However as systems engineering projects continue to grow in complexity, so do the number of requirements, which leads to an increase in cost as more and more work is done to generate requirements and their subsequent inference rules for verification.
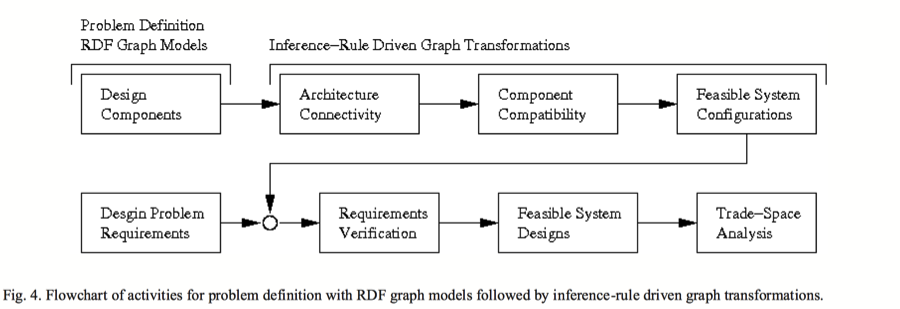
Figure 2. Model-based Systems Engineering Design and Trade-Off Analysis with RDF Graphs.
Manually generating and verifying requirements is far too labor intensive to be able to scale to the complexity of current and future systems; therefore a new way of creating requirements is necessary. This project will continue the work done by Nefretiti Nassar and Mark Austin in their 2013 paper Model0based Systems Engineering Design and Trade-off Analysis with RDF Graphs by trying to replicate the results of the paper without hard coding every single inference rule. I will try to apply Apache Jena in conjunction with Python to create a system architecture, requirement, and component ontology and, hopefully, a scalable process for requirements generation and verification.
References
Midterm Presentation: Scheduled for November 5.
Class Presentation: Scheduled for December 3.
Title: Reliability Analysis of Electric Power Systems for More-Electric Aircraft
Author: Baozhu Zhang
Faculty Advisor: Huan Xu
Abstract: Among the many concerns that modern aircraft are designed to satisfy, flight safety is the most important. Design challenges of secondary importance include finding ways to maintain the reliability rate while improving fuel efficiency, and passing Federal Aviation Administration (FAA) requirements.
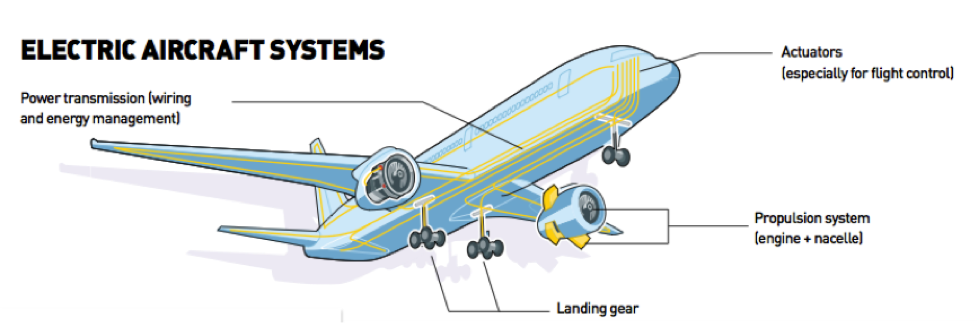
Figure 3. More Electric Aircraft Systems.
The more-electric aircraft (MEA) makes greater use of electrical equipment than its predecessors -- this, in turn, creates new uncertainties, new benefits, and new challenges. For example, instead of using the hydraulic and pneumatic systems, MEA uses an electrically driven system. This system is more flexible in design and carries less weight. MEA also uses new technologies and maximizes the efficiency of the entire aircraft.
This project will investigate new system topology options for the MEA electric power system, with the goal of optimizing efficiency and electric power system's reliability rate, through selection of the best number and placement of components. Solutions to this problem are complicated by dependency relationships among the various parts and subsystems of the aircraft. When the components change and are rearranged, new requirements and constraints are generated for the aircaft assembly, and methods to protect and monitor these components throughout their operating lifetime.
References
Midterm Presentation: Scheduled for November 5.
Class Presentation: Scheduled for December 3.
Title: Platform Design for Commercial Distribution of Rail Vehicle Generated Power
Authors: Christopher G. Weay, Jr. and Troy Johnson
Abstract: As fuel costs increase and the debate over global warming continues, there are calls for increased energy efficiency, reduction of greenhouse gases, and more focus on the development of renewable energy technology. Each day millions of commuters travel by rail and several tons of freight are moved to manufacturing plants and retail stores across the United States by rail. With recent improvements in power electronics technology and the low maintenance cost of alternating current traction motors in rail vehicles, transit and railroad companies are purchasing more vehicles equipped with regenerative braking technology. Regenerative braking converts rail vehicle kinetic energy to electric energy during braking. The most apparent benefit of regenerative braking to rail vehicle operators is the decrease cost of maintenance for mechanical brakes. However, another benefit of regenerative braking is the power that is generated during braking.
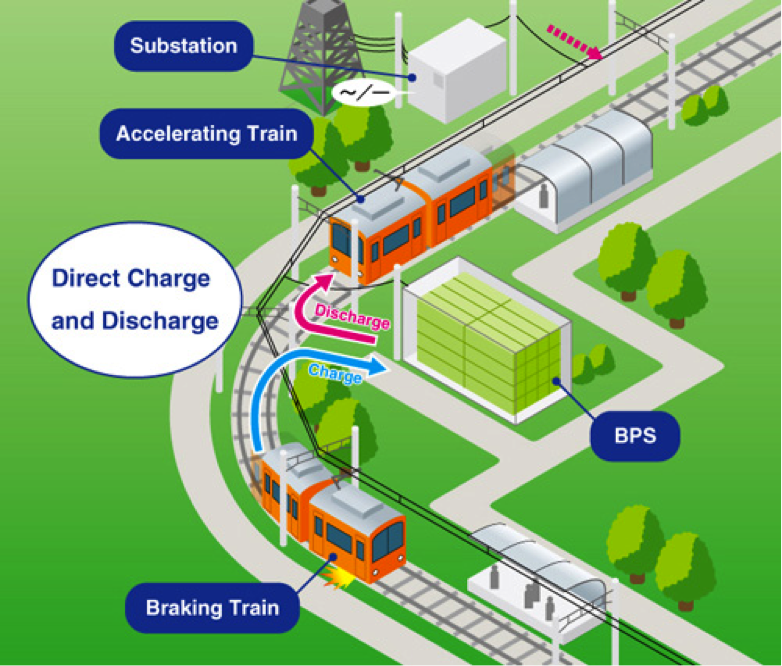
Figure 4. Schematic for Regenerative Braking in Rail Vehicles.
This project will use a model-based systems engineering approach to develop a platform for the commercial distribution of Rail Vehicle generated power. Through the development lifecycle, a library of re-useable components will be created. Validation and verification procedures will be used to determine the suitability of components versus system requirements. Inspection and Test procedures will be developed for customer validation and for monitoring system performance and quality.
References
Midterm Presentation: Scheduled for November 5.
Class Presentation: Scheduled for December 3.
Title: Sensor-Driven Airport Taxiway and Runway Control
Author: Xenia Barnes
Abstract: Airport runway safety is a major concern within the aviation community, especially as the number of runway incursions continue to rise. Runway safety is measured by the frequency, severity and types of runway incursions [1]. According to the Federal Aviation Administration (FAA), a runway incursion is considered to be any occurrence involving the incorrect presence of an aircraft, vehicle or person which creates a collision hazard on the surface designated for the landing and takeoff of aircraft. Despite the efforts of the FAA, the number of runway incursions from 2009 to 2013 rose by 26% [2]. The concept of runway safety is a shared responsibility between air traffic controllers, pilots, drivers and pedestrians which merges both tower and airport operations into one system and is largely dependent on effective communication between all actors.
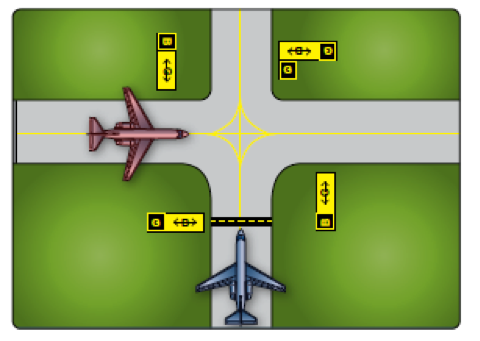
Figure 5. Schematic for an Airport Taxiway.
This project will investigate how sensors can help minimize airport runway incursions by modeling and evaluating a sensor-driven airport taxiway and runway control system. I will specifically explore the behavior at taxiway and runway intersections and derive a model based on occupancy status. I will also perform validation and verification of the functions and behavior of the system based on operational and safety requirements
References
Midterm Presentation: Scheduled for November 5.
Class Presentation: Scheduled for December 3.
Title: Verification and Validation of a Five-Axis CNC Milling Center
Author: Yuyao He
Abstract: Computer numerical control (CNC) manufacturing technology is one of the most advanced manufacturing methodologies in the industry. CNC machines have a various range of models such as CNC milling machines, CNC plasma cutters, and 3D printing. In this project, I will only emphasize the CNC milling machine. After the first modern CNC mill was introduced at the Massachusetts Institute of Technology in 1952 [1], the functionality for the CNC milling machines are varied and have been widely applied in the manufacturing process. Currently, the most advanced and widely applied model in the industry is the 5-sided/5-axis milling center. A conventional 3-axis machining center can only move a part in two directions (X and Y), and the tool moves up and down (Z). A 5-axis can move a part or a tool on five different axes simultaneously (X, Y, Z and two additional rotary axes) [2]. Five-sided machining (also known as 3+2) is the process of setting up a part one time and machining five sides. In order to achieve this, a 5-axis milling center will be used since 3-axis mills can only machine the part one side at a time [2]. The five-axis technology dramatically increases the manufacturing accuracy and efficiency.
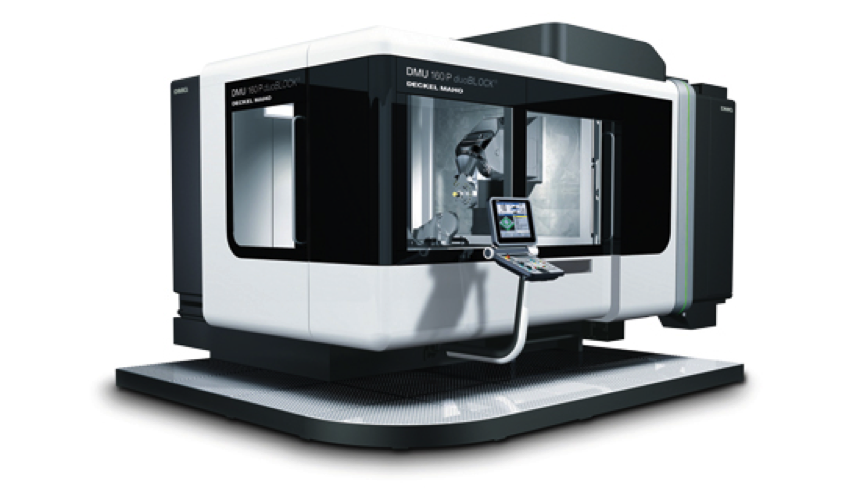
Figure 6. DMU 160 P duoBLOCK 5-sided/5-axis milling center by DMG [3].
The objectives of this project are to understand all the functionalities of the CNC milling machines and how they improve the efficiency of the manufacturing process. In this project, I will create an engineering model of a five-axis CNC milling center and verify the accuracy of the product.
References
Midterm Presentation: Scheduled for November 5.
Class Presentation: Scheduled for December 3.
Title: Ontology and Rule-Based Modeling of City Connectedness
Author: Alan Nguyen and James Vaughn
Abstract: The population of the world is expected to grow to over 10 billion people by 2050. This is causing cities to become larger and more complex, and can be thought of as large system of systems. There is an increasing need to model the inter-system behavior of these cities since failures in one system can cause cascading failures, leading to higher consequences than originally expected. The unpredicted cascading failures occurs because each system was designed independently and analysis was never performed on how each system would affect one another.
Last semester, we explored the use of higraphs and systems-of-systems techniques to create a framework for modeling the relationships and behaviors between city systems. We will continue developing this framework by creating ontologies for each city system and defining rules the govern the relationships between them using Apache Jena. We will then use verification and validation techniques to ensure correctness.
References
Midterm Presentation: Scheduled for November 5.
Class Presentation: Scheduled for December 3.
Title: A Single Tool for Small Systems Engineering Teams
Author: Travis Chezick
Abstract: Systems engineering activities take place over the entire lifecycle of a project and cover several substantial facets including Requirements Definition/Management, Risk Management, Interface definition/control/implementation, Integration, Verification, Validation, and several others. Each of these areas have substantial toolsets available to them, but the systems engineer is often left to their own devices in piecing together the overall picture of the project status.
The current work aims to rectify this situation by providing a minimal implementation of the tools needed for the major themes, then adding strong cross-theme linkages and data visualization to enable better SE and management decision-making. A major theme of the tool is to seamlessly connect the various layers and entities in a project with minimal SE and management overhead. The tool will also ease the incorporation of model-based concepts into established systems engineering cultures.
References
Midterm Presentation: Scheduled for November 5.
Class Presentation: Scheduled for December 3.
Title: Co-Simulation of Smart Grid Compatible Residential Facilities
Author: David Daily
Abstract: In order to achieve advanced energy efficiency is residential home, a high degree of controls is required for the systems within the home. Protocols, including BACNet have been developed to help foster integration of the control of these different systems. However, it is important to include validation and verification of the control strategies before they are implemented in the system to assure that the behavior of the control is truly optimal.
MLE+ is a program that has been developed to allow for co-simulation between MATLAB and EnergyPlus. MATLAB allows for the easy and familiar coding of advanced control strategies. Meanwhile, EnergyPlus is a whole-building simulator that can simulate the complex, physical nature of energy flow within a building. MLE+ is a necessary tool since EnergyPlus has a confusing and limited Energy Management System component that can be much more easily done in MATLAB.
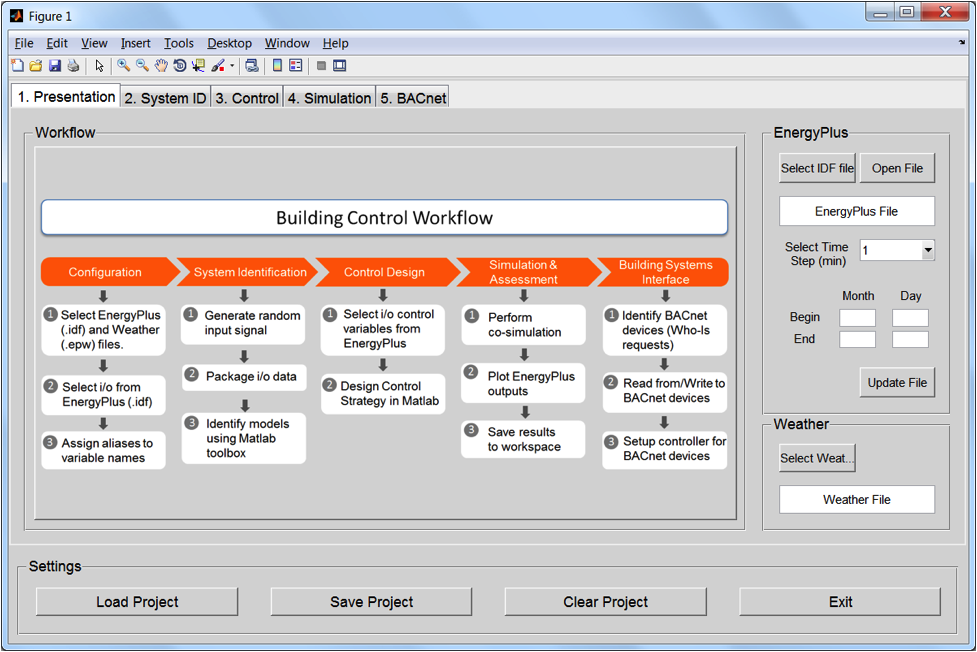
Figure 7. Building control workflow in MLE+.
For my project, I will take the NIST Net-Zero Energy Residential Test Facility model in EnergyPlus and develop control strategies that investigates and highlights the ability of the home to integrate with the Smart Grid. Smart appliances and other energy management techniques will be implemented in MATLAB and simulated in EnergyPlus. The strategies themselves will be validated and the results will be verified with previous strategies developed solely in EnergyPlus.
References
Midterm Presentation: Scheduled for November 5.
Class Presentation: Scheduled for December 10.
Title: Air Traffic Collision Avoidance System (TCAS) for
Unmanned Aircraft operating in the vicinity of Commercial Airports
Author: Jacob Moschler
Abstract: Thanks to the 2012 FAA Reauthorization Act, Unmanned Aircraft Systems (UAS) are poised for commercial use in the United States Class A National Airspace (NAS) beginning in 2015. The FAA has proposed changes to Federal Aviation Regulation (FAR) 91.113 which will include a requirement for unmanned aircraft to detect and avoid commercial aircraft using electronic means. Compliance with proposed rules will present a special challenge in and around commercial airports where commercial aircraft operate below 400 feet while taking off and landing.

Figure 8. Aircraft departure paths.
A control algorithm described in the 2009 thesis by Pedram Hovareshti, CONSENSUS PROBLEMS AND THE EFFECTS OF GRAPH TOPOLOGY IN COLLABORATIVE CONTROL, will be implemented (above a hardware abstraction layer). The initial phase is to model aircraft paths and create virtual potential fields around the paths which will push UAS out of the way before the danger of a collision exists. A distributed model for the aggregate motion of flocking behavior created by Craig Reynolds will be considered for modeling UAS behavior, and ultimately used together with NASA's Future Air Traffic Management Concepts Evaluation (FACET) tool or the FAA's System-Wide Analysis Capability (SWAC) model of the National Airspace. The algorithms will be simulated together with air traffic simulations to determine if collisions can be successfully avoided.
References
Midterm Presentation: Scheduled for October 29.
Class Presentation: Scheduled for December 10.
Title: Using UPPAAL to Verify Behavior of a Hypernetwork and Hypergraph Model of Baseball
Authors: Calvin Brien, Amber Tucker
Abstract: The game of baseball lends itself to application in a systems engineering case study. With knowledge of all the rules and situations involved in a baseball game, it is apparent that the game is complex, involves a great deal of strategy, and decisions are driven by a massive amount of available data. To analyze the game from a systems engineering perspective, last semester we created a model to describe situations in a baseball game using hypernetworks and hypergraphs. This semester, we will use UPPAAL to verify outcomes of system behavior scenarios of last semester's model (i.e., plays).
References
Midterm Presentation: Scheduled for October 29.
Class Presentation: Scheduled for December 10.
Title: Verification and Validation Methods for a Tactile Sensing Skin System
Author: Peter Block
Abstract: This project expands on the previous ENSE 622 project which investigated modeling a system of tacticle pixels made of conductive polymers to provide a cheap and scalable solution to create robotic skins .
The purpose of this project will be to develop suitable verification and validation methods for a tactile sensing skin system. This project will look at the not only testing the functionality of the system (e.g. are all sensor pads responsive, are they responding to pressure accordingly) but also investigate ways of creating a test for the software and hardware when implemented in large scale systems. This project will consider aspects of verification and validation modeling, diagnostic testing, digital signal processing, and software/hardware validation.
References
Midterm Presentation: Scheduled for October 29.
Class Presentation: Scheduled for December 10.
Title: Verification and Validation of RS232 Standard
Author: Premalatha Ramadurai
Abstract: .... RS-232 is a standard communication protocol for linking computer and its peripheral devices to allow serial data exchange. RS232 defines the voltage for the path used for data exchange between the devices. It specifies common voltage and signal level, common pin wire configuration and minimum, amount of control signals. This standard was designed with specification for electromechanically teletypewriter and modem system and did not define elements such as character encoding, framing of characters, error detection protocols that serve as essential features when data transfer takes place between a computer and a printer. Without these features RS-232 could not be adopted to transfer data between a computer and a printer. To overcome this problem a single integrated circuit called as UART known as universal asynchronous receiver/transmitter is used in conjunction with RS232.
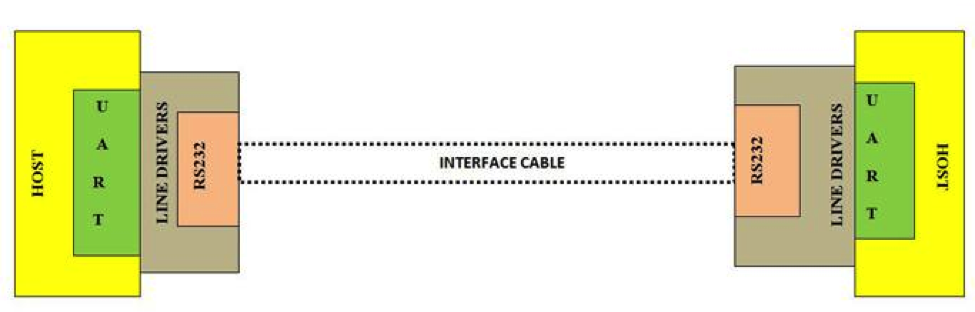
Figure 9. Host-to-host communication enabled by UART and the RS232 Standard.
UART, line drivers and RS232 are three separate parts in the communication system each having its own characteristic features. UART and line drivers are the parts in RS232 to enhance quality of system during serial data exchange.
Verification of the system is very important, in order to detect system inconsistencies between components and to identify any mismatch in data transfer. In this project I am going to build a model based on the behavior of RS-232 standard, and verify the system using LTSA/UPAAL tool.
References
Midterm Presentation: Scheduled for October 29.
Class Presentation: Scheduled for December 10.
Title: Automated Validation of Textual Requirements through Natural Language Processing
Author: Andres Arellano
Abstract: Natural Language Processing (NLP) is a field of artificial intelligence that could be used in several challenges related to Systems Engineering. One important opportunity is systems requirements validation and verification. If we analyze textual requirements we can identify whether there are missing properties, or contradictions, or even visualize the requirements to visually verify the whole system.
This project will explore the usage of NLTK 2.0, a Python platform to build programs to work with human language data.
References
Midterm Presentation: Scheduled for October 29.
Class Presentation: Scheduled for December 10.
Title: Powering Human Body Sensor Nodes with Microgenerators
Author: Mehdi Dadfarnia
Abstract: It is desirable for sensor nodes being placed on the human body to have a power source that does not require recharge or replacement measures the way that batteries do. Recent MEMs technological advances have made it possible to construct microgenerators that can be integrated with sensor node electronics and decrease the maintenance required for the power supply on behalf of the user, if not eliminate it. Microgenerator power source architectures known to be applicable to sensors worn on the human body are the Coulomb-Force Parametric Generator and the Coulomb-Damped Resonant Generator. The two architectures are similar in structure, and they both convert inertial kinematic forces from the body's movements into electric power usable for the sensor nodes. Using capacitive plates to store charge collected from the kinetic motions via electrostatic forces, the structural elements in the microgenerators and the physical make-up of the capacitative plates can be tuned, designed, and tweaked. An optimization of these parameters will help design a microgenerator with a maximized power output, and validate whether it will be giving enough power output to eliminate any recharge or replacement needs for a typical low-powered sensor node.
References
Midterm Presentation: Scheduled for October 29.
Class Presentation: Scheduled for December 10.
Title:
Formal Verification of Wastewater Treatment Processes
Authors: David O'Brien and Chiedo Ohanyerenwa
Abstract: The purpose of wastewater treatment is to allow wastewater to be treated and disposed of in a manner that is not dangerous to human health or the ecosystem. Most wastewater management systems contain three or more treatment processes. Preliminary treatment is a physical process that is responsible for the removal of coarse solids. Primary treatment is also a physical process that is responsible for the removal of settleable organic and inorganic solids through sedimentation. Secondary treatment uses aerobic and anoxic biological treatment methods to further remove organic matter. Tertiary treatment is used only when specific compounds cannot be removed by secondary treatment methods.
Continuing our project from last semester, there are several sub-processes within the secondary wastewater management system that are able to be automated. These sub-processes include the scum, sludge, and collection sub-systems. This semester we would like to verify the automated sub-processes are performed correctly during the treatment process. We will use UPPAAL to model and verify the states the system could be in
References
Midterm Presentation: Scheduled for October 29.
Class Presentation: Scheduled for December 10.
Developed in October 2013 by Mark Austin
Copyright © 2013, Institute for Systems Research, University of Maryland