News Story
New EVDodgeNet is a dynamic obstacle avoidance system for quadrotors
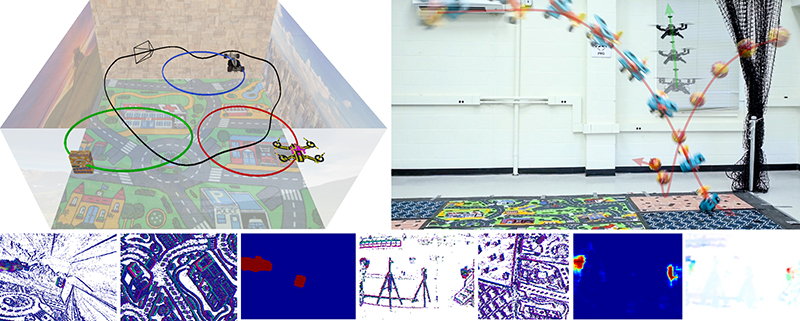
Figure: A real quadrotor running EVDodgeNet to dodge two obstacles thrown at it simultaneously. (b) Raw event frame as seen from the front event camera. (c) Segmentation output. (d) Segmentation flow output which includes both segmentation and optical flow. (e) Simulation environment where EVDodgeNet was trained. (f) Segmentation ground truth. (g) Simulated front facing event frame.
The University of Maryland’s Perception and Robotics Group (PRG) has developed EVDodgeNet, a dynamic obstacle avoidance system for quadrotor UAVs (unmanned aerial vehicles) that uses event cameras as sensors.
EVDodgeNet is a deep learning-based solution for dodging multiple dynamic obstacles on a quadrotor with a single event camera and on-board computation. This approach uses a series of shallow neural networks for estimating both the ego-motion and the motion of independently moving objects. The networks are trained in simulation and directly transfer to the real world without needing fine-tuning or retraining. The approach has been successfully evaluated and demonstrated in many real-world experiments with obstacles of different shapes and sizes. The system has achieved an overall success rate of 70%, including with objects of unknown shape and in a low-light testing scenario.
The researchers believe this is the first deep learning-based solution to the problem of dynamic obstacle avoidance using event cameras on a quadrotor. The navigation stack can cater to different scenarios; for example, the system can be extended to the task of pursuit by merely reversing the control policy.
Read a paper describing the system by PRG researchers Nitin J. Sanket, Chethan M. Parameshwara, Chahat Deep Singh, Ashwin V. Kuruttukulam, ISR-affiliated Associate Research Scientist Cornelia Fermüller (UMIACS), and ISR-affiliated Professor Yiannis Aloimonos (CS/UMIACS), along with Davide Scaramuzza of the University of Zurich and ETH Zurich. PRG is part of the University of Maryland Institute for Advanced Computer Studies, the Maryland Robotics Center, and the Institute for Systems Research.
Published October 30, 2019
Related Stories
Stories / April 19, 2023
Chahat Deep Singh's robot bee work featured in BBC video

Stories / February 7, 2022
MRC and MAGE Earn ARM Institute Endorsement

Stories / March 3, 2020
A cooperative control algorithm for robotic search and rescue
Stories / February 11, 2020
Aerodynamic interaction model improves quadrotor flight...

Stories / July 30, 2018
GapFlyt helps aerial robots navigate more like birds and insects
Stories / October 23, 2025
MRC Seminar Series Starts with Jellyfish-Inspired Robotics

Stories / August 28, 2025
Passing the Torch: Maryland Robotics Center’s Next Chapter
Stories / August 14, 2025
New Research Helps Robots Grasp Situational Context

Stories / April 2, 2025
Tuna-Inspired Mechanical Fin Could Boost Underwater Drone Power

Stories / March 10, 2025
Developing Efficient Systems for Deep Sea Exploration
