2021
Rupamathi Jaddivada (MIT), Marija Ilic (MIT), Eyad Abed
The researchers explore the potential of active control for end-to-end power trains of hybrid electric aircraft. They expand the operating envelope beyond compressor stall and surge limits, allowing a smaller engine to attain the same performance as a larger one.
Annual Reviews in Control 52
2019
Boumediene Hamz (Imperial College London) and Eyad Abed
The paper studies an extension to nonlinear systems of a recently proposed approach to the definition of modal participation factors.
Nonlinear Dynamics, Nov. 26, 2019
2023
Aisha Al-Obaid, Raymond Adomaitis
A computational algorithm to model an integrated photovoltaic–electrolysis-battery system is presented with the goal of identifying the system's optimal size, from a Pareto front analysis perspective, that maximizes the hydrogen production rate, minimizes the levelized cost of energy (LCE) and total system's cost, while targeting a net-zero grid energy operation.
Sustainable Energy & Fuels (Royal Society of Chemistry)
2020
Raymond Adomaitis
Modeling the dynamics of atomic layer deposition processes is challenging because of the nonlinear behavior of these systems, their multiple and widely-ranging timescales, and by the relative lack of validated reaction kinetics information. Those data that do exist are typically derived from quantum chemical computations or experimental examinations of reaction sequences that define only a portion of the complete ALD reaction cycle. In this talk, I will describe our efforts to develop mathematical methods that address the numerical challenge of simulating dynamic ALD processes while providing a rational path to creating well-posed models of these deposition processes. Our model reduction approach is based on a two-step procedure where in the first step, the chemical species surface balance dynamic equations are factored to decouple the (nonlinear) reaction rates, eliminating redundant dynamic modes. The second phase further reduces the dynamic dimension when species relatively minor in concentration can be identified. The overall technique extracts physically significant reaction invariants and points to potential model structural problems if they exist.
Invited Paper, 73rd Annual Gaseous Electronics Virtual Conference of the American Physical Society, Oct. 5, 2020
2022
Dan Walker, Bilal Ayyub
Central to efforts to reduce loss of life and property damage due to natural disasters is a significant fiscal and intellectual investment in climate-resilient infrastructure. To help the U.S. achieve these twin goals, promoting the development of climate-resilient codes and standards has strategic importance. To tackle the issue, a collaboration between the National Oceanic and Atmospheric Administration and ASCE was formalized in September 2021. Since then, the collaboration has focused on exploring the use of NOAA-produced information about future climatic conditions and the integration of that information into the design and construction of climate-resilient infrastructure. By helping ensure that the design and construction of infrastructure is informed by the best available scientific understanding of future weather and climate conditions, this effort should increase the pace of climate adaptation and reduce design, construction, and maintenance costs, as well as the human and financial costs of climate-related natural disasters.
Geostrata Magazine (ASCE)
Cao Wang, Bilal Ayyub, Aziz Ahmed
Because of the random nature of threatening hazards, in practice it is difficult or even impossible to predict their influences on civil structures. Civil engineers use a probability-based framework to evaluate the safety and serviceability of in-service structures, using powerful structural reliability and resilience assessment tools to quantify a structure’s ability to withstand environmental or operational attacks. This paper proposes closed-form formulas for time-dependent reliability and resilience assessment of aging structures subjected to multiple hazards.
Resilient Cities and Structures (Elsevier)
2021
Proloy Das, Behtash Babadi
Classical statistical tests for Granger causality resort to asymptotic analysis of ordinary least squares, which require long data durations to be useful and are not immune to confounding effects. In this work, we close this gap by introducing a LASSO-based statistic and studying its non-asymptotic properties under the assumption that the true models admit sparse autoregressive representations. We establish that the sufficient conditions of LASSO also suffice for robust identification of Granger causal influences. We also characterize the false positive error probability of a simple thresholding rule for identifying Granger causal effects. We present simulation studies and application to real data to compare the performance of the ordinary least squares and LASSO in detecting Granger causal influences, which corroborate our theoretical results.
arXiv.org
2023
Lida Anna Apergi, Margrét Vilborg Bjarnadóttir, John Baras, Bruce Golden
Healthcare cost predictions are widely used throughout the healthcare system. However, predicting these costs is complex because of both uncertainty and the complex interactions of multiple chronic diseases: chronic disease treatment decisions related to one condition are impacted by the presence of the other conditions. Here, the authors propose a novel modeling approach inspired by backward elimination, designed to minimize information loss. The approach is based on a cost hierarchy: the cost of each condition is modeled as a function of the number of other, more expensive chronic conditions the individual member has. Using this approach, the researchers estimate the additive cost of chronic diseases and study their cost patterns.
INFORMS Journal on Data Science
Touraj Soleymani, John Baras, Karl Johansson
The authors investigate the performance of state estimation under two primary network imperfections, i.e., packet loss and time delay. They make a causal frequency-distortion tradeoff that is defined between the packet rate and the mean square error when the source and the channel are modeled by a partially observable Gauss–Markov process and a fixed-delay packet-erasure channel, under two distinct communication protocols: one with and one without packet-loss detection. They prove the existence of a globally optimal policy profile, and show that this policy profile is composed of a symmetric threshold scheduling policy and a non-Gaussian linear estimation policy.
IEEE Transactions on Automatic Control
John Baras, Mykel J. Kochenderfer, James Anderson, Luca Schenato (chapter on "AI and Big Data")
This work comes from the panel session on "Control for Societal-Scale Challenges: Road Map 2030" at the IFAC World Congress, July 10th, 2023. Control for Societal-Scale Challenges: Road Map 2030 was edited by Anuradha M. Annaswamy, Karl H. Johansson, and George J. Pappas. The document can be downloaded here in PDF format. John Baras was an author on the "AI and Big Data" chapter, and chaired the session on "Electrify Everything."
IEEE Control Systems Society IFAC World Congress 2023
Clinton Enwerem, John Baras, Danilo Romero
A distributed optimal multiagent control scheme for quadrotor formation tracking under localization errors. This control architecture is based on a leader-follower approach, where a single leader quadrotor tracks a desired trajectory while the followers maintain their relative positions in a triangular formation.
arXiv.org
Nilesh Suriyarachchi, Erfaun Noorani, Faizan Tariq, John Baras
Proposes the use of a multi-agent shared policy reinforcement learning algorithm which leverages communication between connected autonomous vehicles (CAVs) for improved observability of downstream traffic conditions. A key feature of this method is the ability to perform shock wave dissipation control without the need for global information and the applicability of this method to multi-lane mixed traffic highways of arbitrary structure.
IEEE 61st Conference on Decision and Control
Faizan Tariq, David Isele, John Baras, Sangjae Bae
This paper proposes a hierarchical autonomous vehicle navigation architecture, composed of a high-level speed and lane advisory system (SLAS) coupled with low-level trajectory generation and trajectory following modules. Specifically, the authors target a multi-lane highway driving scenario where an autonomous ego vehicle navigates in traffic. They propose a novel receding horizon mixed-integer optimization based method for SLAS with the objective to minimize travel time while accounting for passenger comfort.
IEEE 61st Conference on Decision and Control
2022
Erfaun Noorani, Christos Mavridis, John Baras
Risk-sensitive reinforcement learning algorithms have been studied to introduce robustness and sample efficiency, and lead to better real-life performance. Here, the authors introduce new model-free risk-sensitive reinforcement learning algorithms as variations of widely-used Policy Gradient algorithms with similar implementation properties.
arXiv.org
Nilesh Suriyarachchi, Christos Mavridis, John Baras
Traffic shock waves are well-known naturally occurring phenomena that lead to unnecessary congestion in highway networks. Introducing connected autonomous vehicles (CAVs) to highways of human-driven vehicles (HDVs) allows for the development of traffic control schemes that can mitigate the effects of the shock waves. The authors propose a shock wave detection algorithm based on communication between CAVs with local traffic information. The methodology is suitable for multi-lane mixed traffic highways of arbitrary structure, i.e., it is not limited to closed-circuit ring roads. The researchers show that the detection information can be used to design a class of proactive shock wave mitigating CAV controllers. The choice of the controller can depend on design parameters such as the aggressiveness of the driving behavior allowed.
2022 30th Mediterranean Conference on Control and Automation (MED)
Fatemeh Alimardani, John Baras
Throughout the past decades, many different versions of the widely used first-order Cell-Transmission Model (CTM) have been proposed for optimal traffic control. Highway traffic management techniques such as Ramp Metering (RM) are typically designed based on an optimization problem with nonlinear constraints originating in the flow-density relation of the Fundamental Diagram (FD). Most of the extended CTM versions are based on the trapezoidal approximation of the flow-density relation of the Fundamental Diagram (FD) in an attempt to simplify the optimization problem. However, this relation is naturally nonlinear, and crude approximations can greatly impact the efficiency of the optimization solution. The authors propose a class of extended CTMs that are based on piecewise affine approximations of the flow-density relation such that (a) the integrated squared error with respect to the true relation is greatly reduced in comparison to the trapezoidal approximation, and (b) the optimization problem remains tractable for real-time application of ramp metering optimal controllers.
2022 30th Mediterranean Conference on Control and Automation (MED)
Christos Mavridis, George Kontudis, John Baras
Here, the authors introduce a sparse Gaussian process regression model whose covariance function is parameterized by the locations of a progressively growing set of pseudo-inputs generated by an online deterministic annealing optimization algorithm. This is an active learning approach, which, in contrast to most existing works, can modify already selected pseudo-inputs and is trained with recursive, gradient-free updates.
61st IEEE Conference on Decision and Control (2022)
Junjie Jiao, Dipankar Maity, John Baras, Sandra Hirche
Investigates the problem of actuator scheduling for networked control systems. Given a stochastic linear system with a number of actuators, the authors consider the case that one actuator is activated at each time. This problem is combinatorial in nature and NP hard to solve. They propose a convex relaxation to the actuator scheduling problem, and use its solution as a reference to design an algorithm for solving the original scheduling problem. Using dynamic programming arguments, they provide a suboptimality bound of a proposed algorithm.
arXiv.org
Christos Mavridis, Nilesh Suriyarachchi, John Baras
A reinforcement learning algorithm based on an adaptive state aggregation scheme defined by a progressively growing set of codevectors placed in the joint state-action space according to a maximum-entropy vector quantization scheme.
2021 60th IEEE Conference on Decision and Control (CDC)
Ion Matei, Anna Plochowietz, Johan de Kleer, John Baras
The authors address the problem of simultaneous control of micro-objects (chiplets) immersed in dielectric fluid. An electric field, shaped by an array of thousands of electrodes, is used to transport and position chiplets using dielectrophoretic forces. They use a lumped, 2D, capacitive based (nonlinear) model of motion for the chiplets' behavior that include chiplet to chiplet interactions. The chiplet positions are tracked using a high speed camera and image processing algorithms. They use a model predictive control (MPC) approach to derive control inputs (i.e., electrode potentials) that shape the chiplets into a desired pattern.
2021 60th IEEE Conference on Decision and Control (CDC)
Christos Mavridis, John Baras
Proposes an online deterministic annealing algorithm for progressive graph partitioning based on the spectral information of the underlying graph Laplacian matrix.
2021 60th IEEE Conference on Decision and Control (CDC)
Erfaun Noorani, John Baras
The authors present a policy gradient theorem for the Risk-sensitive Control "exponential of integral" criteria, and propose a risk-sensitive Monte Carlo policy gradient algorithm. Simulations, together with our theoretical analysis, show that the use of the exponential criteria with an appropriately chosen risk parameter not only results in a risk-sensitive policy, but also reduces variance during learning process and accelerates learning, which in turn results in a policy with higher expected return: risk-sensitiveness leads to sample efficiency and improved performance.
2021 60th IEEE Conference on Decision and Control (CDC)
Erfaun Noorani, John Baras
Describes new foundations for robust reinforcement learning for control, by exploring analytically the relation between the KL-regularized Reinforcement Learning and the Risk-sensitive Control "exponential of integral" criteria.
2021 60th IEEE Conference on Decision and Control (CDC)
2021
Nilesh Suriyarachchi, John Baras
The communication and sensing capabilities of modern connected autonomous vehicles (CAVs) will allow new approaches in control to help solve the problem of stop-and-go waves in highway networks. The paper introduces a communication-based cooperative control method for CAVs in multi-lane highways in a mixed traffic setting. Each vehicle is able to take proactive control actions. This is an improvement over existing reactive methods which rely on shock waves already being present. In addition, the new method’s performance is independent of the highway structure; the algorithm performs identically on ring roads like “beltways” and straight roads. The method allows for proactive control application and exhibits good shock wave dissipation performance even when only a few CAVs are present amongst conventional vehicles. The results were verified on a three-lane circular highway loop using realistic traffic simulation software.
IEEE 94th Vehicular Technology Conference (Fall 2021)
Amoolya Tirumalai, John Baras
Introduces a particle-based model of autonomous vehicles subject to drag and unknown disturbances, noise, and a speed limit in addition to the control. The authors formulate a robust stochastic differential game on the particles and pass formally to the infinite-particle limit to obtain a robust mean-field game PDE system. They solve the mean-field game PDE system numerically and obtain an optimal control which increases the bulk velocity of the traffic flow while reducing congestion.
arXiv.org
Touraj Soleymani, John Baras, Sandra Hirche
Even though transmission of a piece of sensory information in a networked control system decreases the uncertainty of the controller, it indeed has a price from the economic perspective. It is, therefore, rational that such information be transmitted only if it is valuable in the sense of a cost-benefit analysis, i.e., only if its benefit surpasses its cost. Yet, the fact is that little is known so far about this valuation of information. The authors in this paper study an essential property of controlled stochastic processes by making a rate-regulation trade-off defined between the packet rate and regulation cost. They show that the valuation of information is conceivable and quantifiable grounded on this trade-off. They appeal to a game-theoretic analysis, and seek equilibria at which neither decision maker has a unilateral incentive to change its policy.
IEEE Transactions on Automatic Control
Christos Mavridis, John Baras
The authors propose an adaptive state aggregation scheme to be used along with temporal-difference reinforcement learning and value function approximation algorithms. The resulting algorithm constitutes a two-timescale stochastic approximation algorithm with: (a) a fast component that executes a temporal-difference reinforcement learning algorithm, and (b) a slow component, based on online vector quantization, that adaptively partitions the state space of a Markov Decision Process according to an appropriately defined dissimilarity measure.
2021 American Control Conference
Touraj Soleymani, John Baras, Sandra Hirche, Karl Johansson
A study of an energy-regulation trade-off that delineates the fundamental performance bound of a feedback control system over a noisy channel in an unreliable communication regime.
IEEE Transactions on Automatic Control
Touraj Soleymani, John Baras, Sandra Hirche, Karl Johansson
The rate-regulation trade-off defined between two objective functions, one penalizing the packet rate and the other, the state deviation and control effort, can express the performance bound of a networked control system. However, the characterization of the set of globally optimal solutions in this trade-off for multi-dimensional controlled Gauss-Markov processes has been an open problem. In the present article, we characterize a policy profile that belongs to this set. We prove that such a policy profile consists of a symmetric threshold triggering policy, which can be expressed in terms of the value of information, and a certainty-equivalent control policy, which uses a conditional expectation with linear dynamics.
arXiv.org
Christos N. Mavridis, Amoolya Tirumalai, John Baras
This paper proposes a family of parametric interaction functions in the general Cucker-Smale model such that the mean-field macroscopic system of equations can be iteratively solved in an optimization scheme aiming to learn the inter-action dynamics of the microscopic model from observations of macroscopic quantities.
59th IEEE Conference on Decision and Control
Urszula Libal, John Baras, Karl Johansson
The paper proposes a practical method for a significant dimensionality reduction of Volterra kernels, defining a discrete nonlinear model of a signal by Volterra series of higher order.
59th IEEE Conference on Decision and Control
Touraj Soleymani, John Baras, Sandra Hirche, Karl Johansson
The rate-regulation trade-off defined between two objective functions, one penalizing the packet rate and one the state deviation and control effort, can express the performance bound of a networked control system. However, the characterization of the set of globally optimal solutions in this trade-off for multi-dimensional controlled Gauss-Markov processes has been an open problem. IThis article characterizes a policyprofile that belongs to this set.
arXiv.org
2020
Mohammad Mamduhi, Dipankar Maity, Sandra Hirche, John Baras, Karl Johansson
Proposes a cross-layer optimal co-design of control, sampling and resource management policies for a networked control system consisting of multiple stochastic linear time-invariant systems which close their sensor-to-controller loops over a shared network.
arXiv.org preprint (to appear in the IEEE Transactions on Control of Network Systems)
Ion Matei, Maksym Zhenirovskyy, Johan de Kleer, Christoforos Somarakis, John Baras
Addresses the problem of learning laws governing the behavior of physical systems.
2020 American Control Conference
Zhenyu Lin, John Baras
A modular Q-learning framework to deal with the robot task planning, runtime monitoring and self-correction problem.
2020 American Control Conference
Zhixin Liu, Lin Wang, Daoyi Dong, John Baras
This paper considers the consensus decision-making problem of spatially distributed multiagent systems with multiple leaders, where the leaders have the preference about the destination, while the followers have no such preference.
SIAM Journal on Control and Optimization
Mohammad Mamduhi, Dipankar Maity, John Baras, Karl Johansson
In the design of cyber-physical systems (CPS) where multiple heterogeneous physical systems are coupled via a communication network, a key aspect is to study how network services are distributed among the users. The authors derive the joint optimal time-sensitive control and service allocation policies for each physical system.
KTH Royal Institute of Technology, Stockholm
2019
Ion Matei, Christos Mavridis, John Baras, Maksym Zhenirovskyy
The authors propose a framework based on port-Hamiltonian modeling formalism, aimed at learning interaction models between particles and dynamical properties such as trajectory symmetries and conservation laws of ensembles (or swarms) using large-scale optimization approaches.
2019 IEEE Conference on Decision and Control
Usman Fiaz, John Baras
A hybrid compositional approach to time-critical search and rescue planning for quadrotor UAVs.
arXiv.org
Edited by John Baras, Sandra Hirche, Kay Römer and Klaus Wehrle
This report documents the program and the outcomes of Dagstuhl Seminar 19222, "Control of Networked Cyber-Physical Systems" (May 26–29. 2019). In a series of impulse talks and plenary discussions, the seminar reviewed the current state of the art in CPS research and identified promising research directions that may benefit from closer cooperation between the communication and control communities.
2023
Kushal Chakrabarti, Nikhil Chopra
Gradient-based optimization and control frameworks have been utilized in several applications. The learning rate parameter is typically chosen following a schedule or using methods such as line search to enhance the convergence rate. Recently, the machine learning community has developed methodologies for automated tuning of the learning rate, known as adaptive gradient methods. This paper develops a control theory-inspired framework for modeling adaptive gradient methods that solve non-convex optimization problems.
Automatica
Kushal Chakrabarti, Nikhil Chopra
The previously proposed Newton observer for nonlinear systems has fast exponential convergence and applies to a wide class of problems. However, the Newton observer lacks robustness against measurement noise due to the computation of a matrix inverse. In this paper, the authors propose a novel observer for discrete-time system with sampled measurements to alleviate the impact of measurement noise. The key to the proposed observer is an iterative pre-conditioning technique for the gradient-descent method, used previously for solving general optimization problems.
2023 American Control Conference
Kushal Chakrabarti, Nikhil Chopra
Exploits a control-theoretic methodology in analyzing AdaBound, a recent adaptive gradient algorithm, and proposing a novel optimizer for machine learning.
2022 IEEE 61st Conference on Decision and Control (CDC)
2022
Nikhil Chopra, Masayuki Fujita, Romeo Ortega, Mark Spong
The use of passivity in control theory was motivated by the earlier use of passivity in circuit theory and passive network synthesis, beginning in the 1950s. With the well-known analogy between electrical and mechanical systems, it is natural that passivity should play an important role in the control of mechanical systems and, in particular, in the control of robots. This article provides a historical overview of passivity-based robot control.
IEEE Control Systems Magazine
Kushal Chakrabarti, Nirupam Gupta, Nikhil Chopra
Considers solving an overdetermined system of linear equations in peer-to-peer multi-agent networks. The network is assumed to be synchronous and (strongly) connected.
IEEE Transactions on Control of Network Systems
Kushal Chakrabarti, Nirupam Gupta, Nikhil Chopra
This paper considers the multi-agent linear least-squares problem in a server–agent network architecture. The authors propose an iterative pre-conditioning technique to mitigate the deleterious impact of the data points’ conditioning on the convergence rate of the gradient-descent method.
Automatica
2021
Kushal Chakrabarti, Nirupam Gupta, Nikhil Chopra
Studies a distributed multi-agent convex optimization problem. The system comprises multiple agents in this problem, each with a set of local data points and an associated local cost function.
arXiv.org
Kushal Chakrabarti, Nirupam Gupta, Nikhil Chopra
This paper considers the problem of multi-agent distributed linear regression in the presence of system noises. The authors empirically show that the robustness of the Iteratively Pre-conditioned Gradient-descent (IPG) method compares favorably to state-of-the-art algorithms.
2021 American Control Conference
2020
Lasitha Weerakoon, Nikhil Chopra
This paper investigates an adaptive task space bilateral teleoperation framework for soft robots with dynamic uncertainties. It assumes a non-redundant rigid master manipulator and a redundant soft slave manipulator under the piecewise constant curvature hypothesis.
2020 American Control Conference
Nirupam Gupta, Shripad Gaid, Nikhil Chopra, Nitin Vaidya
This paper propose a distributed optimization algorithm that, additionally, preserves statistical privacy of agents’ cost functions against a passive adversary that corrupts some agents in the network. The algorithm is a composition of a distributed “zero-sum” secret sharing protocol that obfuscates the agents’ cost functions, and a standard non-private distributed optimization method.
arXiv.org
2019
Kushal Chakrabarti, Nirupam Gupta and Nikhil Chopra
This paper considers a distributed solution for a system of linear equations. The underlying peer-to-peer communication network is assumed to be undirected, however, the communication links are subject to potentially large but constant delays. The authors propose an algorithm that solves a distributed least-squares problem, which is equivalent to solving the system of linear equations.
2022
Xiaotian Xu, Guangyao Shi, Pratap Tokekar, Yancy Diaz-Mercado
A distributed interactive framework to provide high-level position instructions for multi-robot aerial cinematography based on coverage over a hemisphere. The control strategy is based on optimization of the coverage functional and geometric relationships over a hemisphere. It enables multiple Unmanned Aerial Vehicles (UAVs) to coordinate their motion while tracking a dynamic (real or virtual) target, and can accommodate high-level human inputs to influence UAV concentration.
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
2023
Jiaqiao Hu, Meichen Song, Michael Fu
The authors consider quantile optimization of black-box functions that are estimated with noise. They propose two new iterative three-timescale local search algorithms. The first algorithm uses an appropriately modified finite-difference-based gradient estimator that requires 2d + 1 samples of the black-box function per iteration of the algorithm, where d is the number of decision variables (dimension of the input vector). For higher- dimensional problems, this algorithm may not be practical if the black-box function estimates are expensive. The second algorithm employs a simultaneous-perturbation-based gradient estimator that uses only three samples for each iteration regardless of problem dimension. Under appropriate conditions, they show the almost sure convergence of both algorithms.
arXiv.org
Xingyu Ren, Michael Fu, Steve Marcus
The authors review the literature on individual patient organ acceptance decision making by presenting a Markov Decision Process (MDP) model to formulate the organ acceptance decision process as a stochastic control problem. Under the umbrella of the MDP framework, they classify and summarize the major research streams and contributions. In particular, they focus on control limit-type policies, which are shown to be optimal under certain conditions and easy to implement in practice. Finally, we briefly discuss open problems and directions for future research.
Systems & Control Letters
2020
Peter Glynn, Yijie Peng, Michael Fu, Jian-Qiang Hu
Proposes a new sensitivity estimator for the distortion risk measure that uses the generalized likelihood ratio estimators in Peng et al.(2020) for distribution sensitivities as input and establish a central limit theorem for the new estimator. The proposed estimator can handle discontinuous sample paths and distortion functions.
researchgate.net (Submitted to INFORMS Journal on Computing)
Sina Miran, Behtash Babadi, Alessandro Presacco, Jonathan Simon, Michael Fu, Steven Marcus
This research develops efficient algorithms for inferring the parameters of a general class of Gaussian mixture process noise models from noisy and limited observations, and utilize them in extracting the neural dynamics that underlie auditory processing from magnetoencephalography (MEG) data in a cocktail party setting.
PLOS Computational Biology
Michael C. Fu, Bingqing Li, Rongwen Wu, Tianqi Zhang
Considers option pricing using a discrete-time Markov switching stochastic volatility with co-jump model, which can model volatility clustering and varying mean-reversion speeds of volatility. For pricing European options, the authors develop a computationally efficient method for obtaining the probability distribution of average integrated variance (AIV), which is key to option pricing under stochastic-volatility-type models. Building upon the efficiency of the European option pricing approach, they are able to price an American-style option, by converting its pricing into the pricing of a portfolio of European options. The work also provides constructive guidance for analyzing derivatives based on variance, e.g., the variance swap.
arXiv.org
Jian Chen, Michael C. Fu, Wenhong Zhang, Junhua Zheng
New modeling research is helping decisionmakers better forecast the spread of the COVID-19 pandemic. The model has been adopted by the Shanghai assistance medical team in Wuhan’s Jinyintan Hospital, the first designated hospital in the world to take COVID-19 patients. Forecasts from the new model have been used to prepare medical staff, intensive care unit beds, ventilators, and other critical care medical resources, as well as to support real-time medical management decisions.
Asia-Pacific Journal of Operational Research
2019
L.A. Prashanth, Shalabh Bhatnagar, Nirav Bhavsar, Michael C. Fu, Steven Marcus
Paper introduces deterministic perturbation schemes for random directions stochastic approximation.
IEEE Transactions on Automatic Control
2022
Monica Puerto, Mason Kellett, Rodanthi Nikopoulou, Mark Fuge, Ruth Doherty, Peter Chung, and Zois Boukouvalas
As the amount and variety of energetics research increases, machine aware topic identification is necessary to streamline future research pipelines. The makeup of an automatic topic identification process consists of creating document representations and performing classification. However, the implementation of these processes on energetics research imposes new challenges. Energetics datasets contain many scientific terms that are necessary to understand the context of a document but may require more complex document representations. Secondly, the predictions from classification must be understandable and trusted by the chemists within the pipeline. In this work, the authors study the trade-off between prediction accuracy and interpretability by implementing three document embedding methods that vary in computational complexity.
arXiv.org
2020
Zois Boukouvalas, Monica Puerto, Daniel Elton, Peter Chung, Mark Fuge
Proposes a data fusion framework that uses Independent Vector Analysis to uncover underlying complementary information contained in different molecular featurization methods.
EUSIPCO 2020
Kailyn Cage, Monifa Vaughn-Cooke, Mark Fuge
Introduces and validate the effectiveness of the Interaction Variability method, which maps product components and musculoskeletal regions to determine explicit design parameters through limiting designer variation in the classification of human interaction factors.
MDPI Systems: Special Issue on Human Factors in Systems Engineering
Jun Wang, Kevin Chiu, Mark Fuge
Investigates the joint use of Physics-Informed (Navier-Stokes equations) Deep Neural Networks (i.e.,Deconvolutional Neural Networks) as well as Geometric Deep Learning (i.e., Graph Neural Networks) to learn and compose fluid component behavior. The models successfully predict the fluid flows and their composition behaviors (i.e., velocity fields) with an accuracy of about 99%.
researchgate.net
Wei Chen, Kevin Chiu, Mark Fuge
The authors propose a deep generative model, Bézier-GAN,to parameterize aerodynamic designs by learning from shape variations in an existing database. The resulted new parameterization can accelerate design optimization convergence by improving the representation compactness while maintaining sufficient representation capacity.
arXiv.org
+++++++++
2022
Saeed Mohammadi, Mohammad Reza Hesamzadeh, Steven Gabriel, Dina Khastieva
Linear bilevel programs have been widely used in computational mathematics and optimization in several applications. Single-level reformulation for linear BLPs replaces the lower-level linear program with its Karush-Kuhn-Tucker optimality conditions and linearizes the complementary slackness conditions using the big-M technique. Although the approach is straightforward, it requires finding the big-M whose computation is recently shown to be NP-hard. This paper presents a disjunctive-based decomposition algorithm which does not need finding the big-Ms whereas guaranteeing that obtained solution is optimal.
arXiv.org
2020
Steven Gabriel, Marina Leal, Martin Schmidt
The authors consider a novel class of linear bilevel optimization models with a lower level that is a linear optimization problem with complementarity constraints. They present different single-level reformulations depending on whether the linear complementarity problem (LCP) as part of the lower-level constraint set depends on the upper-level decisions or not as well as on whether the LCP matrix is positive definite or positive semidefinite. The connection to linear trilevel models that can be seen as a special case of the considered class of bilevel problems under some additional assumptions is illustrated. Two generic and illustrative bilevel models from the fields of transportation and energy are presented to show the practical relevance of the newly introduced class of bilevel problems and show related theoretical results.
Universität Trier
Billy Champion, Steven Gabriel, Ahti Salo
A risk-based, stochastic multi-period model with binary decision variables at each stage has usefulness for planning the retrofitting of buildings for energy conservation.
Energy Systems
2021
Saumyadipta Pyne, Ryan Stauffer, Benjamin Kedem
The authors recently developed a new Augmented Reality (AR) framework to combine real data with computer-generated synthetic samples to “look under the hood”, as it were, for gaining insights into rare, dynamic phenomena. Using data fusion and density ratio model, AR allows them to estimate the tail probabilities of exceeding large thresholds that are far beyond the limited range of observations in moderately sized data. Such thresholds represent extreme events. This study models the drastic change in air pollution levels in Washington, D.C. caused by the COVID-19 pandemic lockdown in 2020.
23rd Annual Conference of the Society of Statistics, Computer and Applications
Benjamin Kedem, Ryan Stauffer, Xuze Zhang, Saumyadipta Pyne
Environmental researchers, as well as epidemiologists, often encounter the problem of determining the probability of exceeding a high threshold of a variable of interest based on observations that are much smaller than the threshold. Moreover, the data available for that task may only be of moderate size. This generic problem is addressed by repeatedly fusing the real data numerous times with synthetic computer-generated samples. The threshold probability of interest is approximated by certain subsequences created by an iterative algorithm that gives precise estimates. The method is illustrated using environmental data including monitoring data of nitrogen dioxide levels in the air.
International Journal of Statistics in Medical Research
Xuze Zhang, Benjamin Kedem
Residual coherence is a graphical tool for selecting potential second-order interaction terms as functions of a single time series and its lags. This paper extends the notion of residual coherence to account for interaction terms of multiple time series. Moreover, an alternative criterion, integrated spectrum, is proposed to facilitate this graphical selection. A financial market application shows that new insights can be gained regarding implied market volatility.
Statistics in Transition
Xuze Zhang, Saumyadipta Pyne, Benjamin Kedem
In disease modeling, a key statistical problem is the estimation of lower and upper tail probabilities of health events from given data sets of small size and limited range. Assuming such constraints, we describe a computational framework for the systematic fusion of observations from multiple sources to compute tail probabilities that could not be obtained otherwise due to a lack of lower or upper tail data. Regional prediction, in Washington state, of the number of pertussis cases is approached by providing joint probabilities using fused data from several relatively small samples following the selected density ratio model. The model is validated by a graphical goodness-of-fit plot comparing the estimated reference distribution obtained from the fused data with that of the empirical distribution obtained from the reference sample only.
Entropy
Xuze Zhang, Benjamin Kedem
Residual coherence is a graphical tool for selecting potential second-order interaction terms as functions of a single time series and its lags. This paper extends the notion of residual coherence to account for interaction terms of multiple time series. Moreover, an alternative criterion, integrated spectrum,is proposed to facilitate this graphical selection.A financial market application shows that new insights can be gained regarding implied market volatility.
arXiv.org
2020
Benjamin Kedem, Saumyadipta Pyne
This article advances the notion of repeated augmented reality in the estimation of very small tail probabilities even from moderately sized samples. Synthetic data can enhance patterns in real data and thus provide insights into different phenomena. Here, the estimation of tail probabilities of rare events from a moderately large number of observations is considered. The problem is approached by a large number of augmentations or fusions of the real data with computer-generated synthetic samples. The tail probability of interest is approximated by subsequences created by a novel iterative process. The estimates are found to be quite precise. Residential radon level data from Beaver County, Pa., is used as an illustration.
healthanalytics.net
Xuze Zhang, Saumyadipta Pyne, Benjamin Kedem
A density ratio model with an extension of variable tilts can estimate residential radon level distribution in areas where exposure to underground radon may be an issue.
arXiv.org
2019
Benjamin Kedem, Lemeng Pan, Paul J. Smith. Chen Wang
The paper presents the novel statistical idea of “Down-Up” sequences which “capture” small tail probabilities with surprising precision without knowing the underlying probability distributions.
Mathematics and Statistics
2023
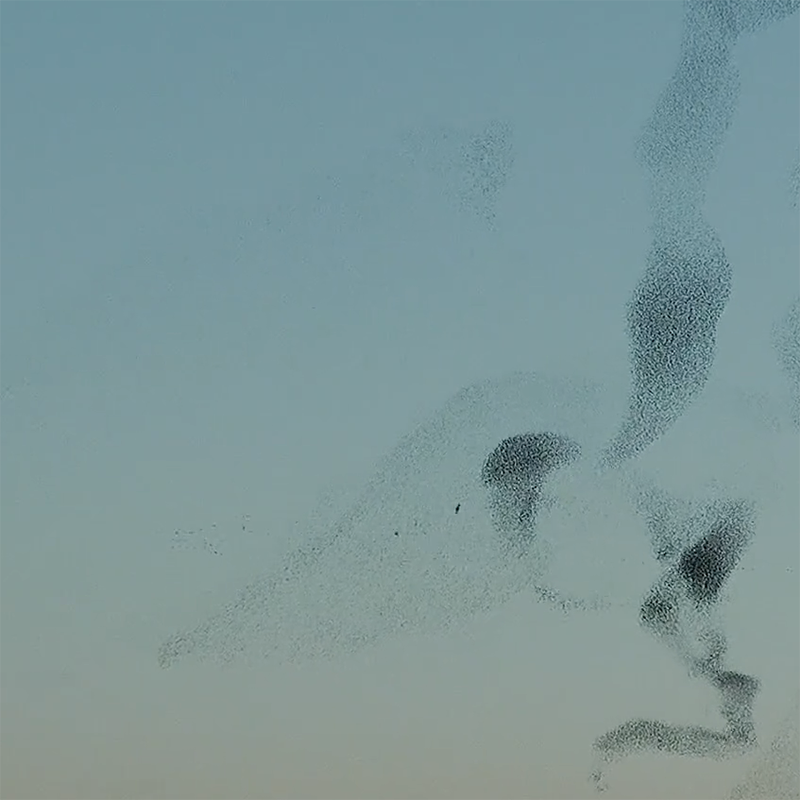
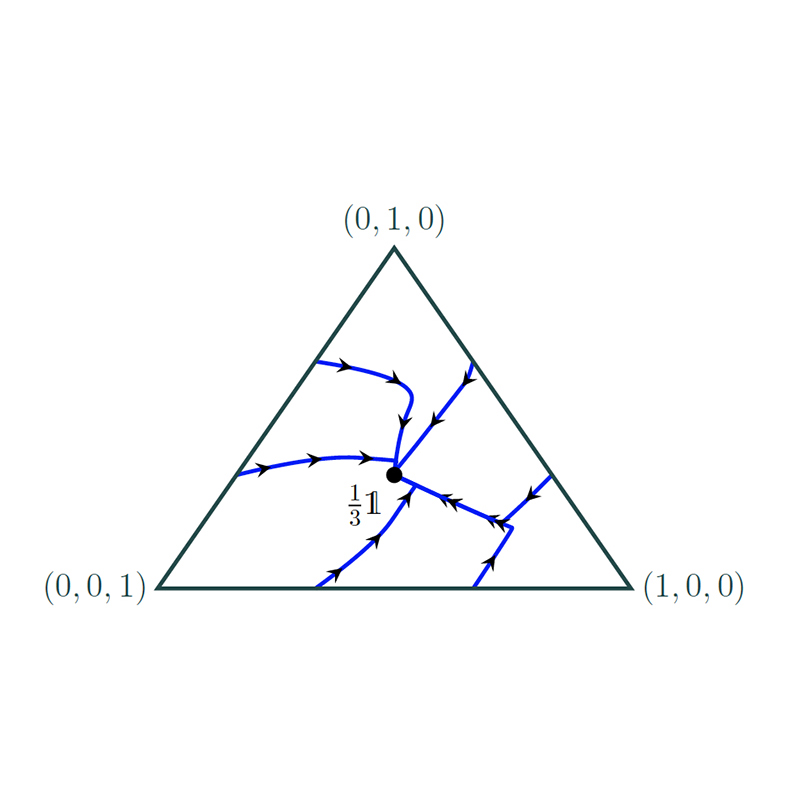
Udit Halder, Vidya Raju, Matteo Mischiati, Biswadip Dey, P. S. Krishnaprasad
Avian flocks display a wide variety of flight behaviors, including steady directed translation of center of mass, rapid change of overall morphology, re-shuffling of positions of individuals within a persistent form, etc. These behaviors may be viewed as flock-scale strategies, emerging from interactions between individuals, accomplishing some collective adaptive purpose such as finding a roost, or mitigating the danger from predator attacks. While we do not conceive the flock as a single cognitive agent, the moment-to-moment decisions of individuals, influenced by their neighbors, appear as if to realize collective strategies that are cognizant of purpose. In this paper, we identify the actions of the flock as allocation of energetic resources, and thereby associate a cognitive cost to behavior. Our notion of cognitive cost is a measure of the temporal variability of such resource allocation. Using a recently developed natural geometric approach to kinetic energy allocation, we map the flock behavior to a temporal signature on the standard (probability) simplex. From the signature of a flocking event, we calculate the cognitive cost as a solution to an optimal control problem based on a game-theoretic model. Alternatively, one can associate to a signature an entropic cost. These two-cost measures, when applied to data on starling flocks, show a consistent spread in value across events, and we suggest the possibility that higher cost may arise from flock response to predator attacks.
Systems & Control Letters
2023
Nuno Martins, Jair Certório, Richard La
The authors put forth a system theoretic methodology to model and regulate the endemic prevalence of infections for the case where the decisions of a population of strategically interacting agents determine the epidemic transmission rate. In their framework, the agents choose from a finite set of strategies that influence the transmission rate, and they can repeatedly revise their choices to benefit from the strategies’ net rewards (payoff) resulting from incentives after deducting the strategies’ intrinsic costs.
Automatica
2019
Senthil Hariharan Arul, Dinesh Manocha
A new algorithm for decentralized collision avoidance for quadrotor swarm navigation in dense environments with static and dynamic obstacles.
arXiv.org
2023
Xingyu Ren, Michael Fu, Steve Marcus
The authors review the literature on individual patient organ acceptance decision making by presenting a Markov Decision Process (MDP) model to formulate the organ acceptance decision process as a stochastic control problem. Under the umbrella of the MDP framework, they classify and summarize the major research streams and contributions. In particular, they focus on control limit-type policies, which are shown to be optimal under certain conditions and easy to implement in practice. Finally, we briefly discuss open problems and directions for future research.
Systems & Control Letters
2020
Sina Miran, Behtash Babadi, Alessandro Presacco, Jonathan Simon, Michael Fu, Steven Marcus
This research develops efficient algorithms for inferring the parameters of a general class of Gaussian mixture process noise models from noisy and limited observations, and utilize them in extracting the neural dynamics that underlie auditory processing from magnetoencephalography (MEG) data in a cocktail party setting.
PLOS Computational Biology
2019
L.A. Prashanth, Shalabh Bhatnagar, Nirav Bhavsar, Michael C. Fu, Steven Marcus
Paper introduces deterministic perturbation schemes for random directions stochastic approximation.
IEEE Transactions on Automatic Control
2023
Semih Kara, Nuno Martins
Population games model the evolution of strategic interactions among a large number of uniform agents. Due to the agents’ uniformity and quantity, their aggregate strategic choices can be approximated by the solutions of a class of ordinary differential equations. This mean-field approach has found to be an effective tool of analysis. However its current proofs rely on advanced mathematical techniques, making them less accessible. In this article, we present a simpler derivation, using only undergraduate-level probability.
arXiv.org
Semih Kara, Nuno Martins
Kara and Martins report on new sufficient conditions for the stability of evolutionary dynamics in population games. A large number of agents interact non-cooperatively in a population game by selecting strategies based on their payoffs. Each agent is allowed to revise its strategy repeatedly with an average frequency referred to as the revision rate. The authors are interested in the case where an agent's current strategy influences directly the revision rate. Existing stability results for this case assume that a memoryless potential game generates the strategies' payoffs. This article extends these results to allow for payoff mechanisms that can be either dynamic or memoryless games that do not have to be potential. The researchers assume that the agents' revision preferences follow a so-called pairwise comparison protocol. These protocols are ubiquitous because they operate fully decentralized and with minimal information requirements (they need to access only the payoff values, not the mechanism). They use a well-motivated example to illustrate an application of their framework.
IEEE Transactions on Control of Network Systems
Nuno Martins, Jair Certório, Richard La
The authors put forth a system theoretic methodology to model and regulate the endemic prevalence of infections for the case where the decisions of a population of strategically interacting agents determine the epidemic transmission rate. In their framework, the agents choose from a finite set of strategies that influence the transmission rate, and they can repeatedly revise their choices to benefit from the strategies’ net rewards (payoff) resulting from incentives after deducting the strategies’ intrinsic costs.
Automatica
2022
Semih Kara, Nuno Martins
This paper shows that for a considered protocol class, established conditions that ensure convergence under strategy-independent revision rates may be violated when the revision rates are strategy-dependent. The authors also prove that a minor, well-motivated modification of the considered protocol class satisfies these conditions for any strategy-dependent revision rates.
IEEE Control Systems Letters
2020
MirSaleh Bahavarnia, Yasser Shoukry, Nuno Martins
A simple approach to use satisfiability modulo theories (SMT) solvers to synthesize stabilizing controllers subject to logical and structural constraints—such as the transitive property of the connectivity of a networked system, and the mutually exclusive use of inputs or sensors.
2020 American Control Conference
2023
Erin Fowler, Derek Paley
The research described here is specific to the Earth-Moon system and determines advantageous formations for interferometric imaging of other spacecraft in the cislunar regime for space domain awareness and spacecraft characterization applications based on metrics for imaging and object tracking as well as an instability metric to approximate the control cost for the proposed formation.
CDCL paper
Animesh Shastry, Leela Cañuelas, Derek Paley
This article describes and experimentally evaluates a comprehensive system identification framework for high-performance UAV control in wind. The framework incorporates both linear offline and nonlinear online methods to estimate model parameters in support of a nonlinear model-based control implementation.
International Journal of Robust and Nonlinear Control
Anthony Thompson, Leela Cañuelas, Derek Paley
This paper presents a dynamic model of multiple self-propelled particles with a periodic controller inspired by the intermittent locomotive behavior in various fish species. The closed-loop dynamics are split into a burst phase during which each particle applies a control input and a coast phase during which each particle performs state estimation. This model allows us to investigate how having non-overlapping sensing and control affects a system's ability to achieve collective behavior such as steering to some desired direction. Using a closed-loop heading controller and a linear observer, we evaluate the stability properties of the equilibrium points of a single particle system for state feedback with bounded actuator noise and output feedback with bounded sensor noise. These results are then extended to a multi- particle system for the state feedback and output feedback cases with both synchronous and asynchronous burst phases.
IEEE Transactions on Automatic Control
Artur Wolek, Derek Paley
An estimation and control framework to stabilize the parallel motion of a school of robotic fish using sensory feedback. Each robot is modeled as a constant speed, planar, self-propelled particle that produces a flowfield according to a dipole potential flow model. An artificial lateral line system senses pressure fluctuations at several locations along each robot’s body. The equations of motion and measurement model are formulated in a path frame that translates and rotates with each robot’s position and velocity, respectively. A particle filter estimates the relative position and heading of other nearby robots. The resulting estimate drives a Lyapunov- based formation controller to synchronize the headings of the robots and achieve a parallel formation. Numerical simulations illustrate the proposed approach.
CDCL paper; IROS 2023
Rose Gebhardt, Derek Paley
This paper presents a feedback control design that stabilizes the position of a drifting vortex in a freestream over a deformable Joukowski foil using camber control.
CDCL paper; American Control Conference 2023
2022
Curtis Merrill, Derek Paley
The attitude and shape control of a large flexible spacecraft modeled as the hinged connection of multiple rigid bodies is considered. The spacecraft consists of a hub actuated by a reaction wheel and several appendages actuated by torque rods. The hinges rotate only in one direction, so a planar model is used. The appendages are connected by stiff springs and a dynamic model of the internal forces and moments of the system utilizes coordinates in the reference frame of the hub. Lyapunov analysis is performed to generate a distributed feedback control law for the reaction wheel and torque rods. Numerical simulations illustrate the performance of the proposed controller for orbital motion.
CDCL paper
Alexander Donkels, Johann Dauer, Derek Paley
An analysis of the dynamics and stability of a nonlinear model of a small-scale tethered rotorcraft. The authors develop a simplified model of a rotorcraft’s longitudinal dynamics and vary model parameters including tether force, trim conditions, and the horizontal wind to study the interdependence of those parameters and their impact on the model’s equilibrium points and stability. This is a preliminary step towards design of an automatic control of an unmanned rotorcraft capable of autonomous tethered landing and development of tether force control laws for the winch device.
CDCL paper
Yen-Chen Liu, Alireza Jafari, Jae Kun Shim, Derek Paley
This study presents a modified social force model to predict the interactions of an electric scooter with a pedestrian crowd by considering the scooter's kinematics constraints and geometry and the velocity-dependent behaviors of the rider.
IEEE Transactions on Intelligent Transportation
Anthony Thompson, Derek Paley
Inspired by the periodic swimming of many fish species, this paper presents a dynamic model of self-propelled particles with a periodic controller.
CDCL paper submitted to ACC 2022
2021
Curtis Merrill, Derek Paley
The authors consider the multiple-sensor multiple-target detection and tracking problem in a sensor network consisting of resource-constrained multi-function radars.
AIAA SciTech Forum and Exhibition 2022
Debdipta Goswami, Derek Paley
This paper considers the problem of bilinearization and optimal control of a control-affine nonlinear system by projecting the system dynamics onto the Koopman eigenspace. Although there are linearization techniques like Carleman linearization for embedding a finite-dimensional nonlinear system into an infinite-dimensional space, they depend on the analytic property of the vector fields and work only on polynomial space. The proposed method utilizes the Koopman Canonical Transform, specifically the Koopman eigenfunctions of the drift vector field, to transform the dynamics into a bilinear system under certain assumptions.
IEEE Transactions on Automatic Control
Sheng Cheng, Derek Paley
This paper describes an optimization framework to control a distributed parameter system using a team of mobile actuators.
Paper submitted to Automatica
Sheng Cheng, Derek Paley
Proposes an optimization frameworkfor steering a team of mobile actuators to control a diffusionprocess with unknown initial conditions.
CDCL paper
Debdipta Goswami, Artur Wolek, Derek Paley
Considers the problem of data-driven estimation with sparse measurements for a complex nonlinear system. While model-based nonlinear estimation methods are well known, state estimation from partial observations with unmodeled dynamics is less understood. The authors use a method for model-free estimation based on an echo-state network (ESN)where a reasonably accurate set of training data is available during the training period and some sparse measurements are obtained during the testing phase.
CDCL paper
Justin Lidard, Debdipta Goswami, David Snyder, Girguis Sedky, Anya Jones, Derek Paley
Proposes state- and output-feedback controls for a pitching airfoil in an unsteady flow using the Goman–Khabrov model.
Journal of Guidance, Control and Dynamics
2020
Debdipta Goswami, Derek Paley
Considers the problem of non-Gaussian estimation and dynamic output feedback in both linear and nonlinear settings. Estimation with non-Gaussian process noise, although important in fields such as environmental sampling, is typically problem specific and suboptimal. The approach described here uses the Gaussian mixture model to approximate an unknown non-Gaussian distribution and to employ the Kalman filter and its nonlinear variants: the extended and unscented Kalman filters.
Journal of Guidance, Control and Dynamics
Sheng Cheng, Derek Paley
An optimization framework to control a distributed parameter system (DPS) using a team of mobile actuators. The optimization simultaneously seeks efficient guidance of the mobile actuators and effective control of the DPS such that an integrated cost function associated with both the mobile actuators and the DPS is minimized.
CDCL paper
Brian Free, Jinseong Lee, Derek Paley
The paper presents a state-feedback control law for steering a fish-inspired robot in a desired direction, and engaging it in pure pursuit.
Bioinspiration and Biomimetics
2021
M. Paul Laiu, André L. Tits
An exact-penalty-based framework for allowing for infeasible starts in solving CQPs (including linear optimization problems. With negligible additional computational cost per iteration, an infeasibility test is included that provides an infeasibility certificate when the problem at hand is indeed infeasible.
Mathematical Programming
2020
Donald H. Costello III, Jason Jewell, Huan Xu
The current safety of flight clearances for unmanned aircraft requires a qualified operator who can make decisions and ultimately bears the responsibility for the safe operations of the vehicle. The future of aviation is unmanned, and ultimately autonomous. Yet, a method for certifying an autonomous vehicle to make decisions currently reserved for qualified pilots does not exist. Before we can field autonomous systems, a process needs to be approved to certify them.
This paper analyzes the flight-test data (both developmental and operational) of an autonomous decision engine selecting an appropriate landing site for a large rotorcraft in an unprepared landing zone. In particular, this paper focuses on using legacy test and evaluation methods to determine their suitability for obtaining a safety of flight clearance for a system that possesses autonomous functionality.
The autonomous system under test was able to complete a mission currently reserved for qualified pilots under controlled conditions. However, when confronted with conditions that were not anticipated (or programmed), the software lacked the judgment a pilot uses to complete a mission under off-nominal conditions.
AIAA Journal of Air Transportation
Andrew Poissant, Lina Castano, Huan Xu
The researchers have developed a UAV hazard mitigation software that guards against ground impact in highly populated areas. Successful incorporation of the ground impact and hazard mitigation (GIHM) module into UAV software reduces fatalities per flight hour and brings UAVs closer to being safe enough for integration into the NAS.
AIAA Journal of Aerospace Information Systems