News Story
Ph.D. student Nilesh Suriyarachchi gives seminar on connected autonomous vehicles for KTH

Top: Nilesh Suriyarachchi and a furry friend. Bottom: Networked vehicles image courtesy U.S. Department of Transportation
On May 28, 2021, third-year ECE Ph.D. student Nilesh Suriyarachchi gave a Transport Seminar on “Cooperative Highway Merging for Heterogeneous Autonomous Traffic” for the KTH Integrated Transport Research Laboratory. Nilesh is advised by Distinguished University Professor John Baras (ECE/ISR). | View the slides here |
Highway on-ramp merge junctions remain a major bottleneck in transportation networks. However, with the introduction of Connected Autonomous Vehicles (CAVs) with advanced sensing and communication capabilities, modern algorithms can capitalize on the cooperation between vehicles. Nilesh’s research optimally coordinates CAVs to enhance highway merging efficiency by maximizing the flow of vehicles while satisfying all safety constraints. He also focuses on the effect of varying priorities of different vehicle classes in selecting the best merging sequence. The algorithm described in the seminar is capable of real time operation through parallel computation, optimized merge sequence generation and management of the diverse needs of heterogeneous (multi-class) traffic. Its results are verified through realistic traffic simulation software.
Nilesh’s interests closely correlate with the research done in KTH. He was invited to give the transport seminar talk based on his interactions with other presenters, professors and hosts in previous seminar sessions.
In general, Nilesh’s Ph.D. research focuses on the cooperative planning and control of connected CAVs. He uses optimization, reinforcement learning, and logic-based methods. In particular, he looks at the way capabilities of CAVs can be leveraged to solve issues and bottlenecks plaguing modern highway transportation networks. After graduation, Nilesh hopes to become an industry researcher. “I love the idea of taking part in cutting edge research in the field of autonomous vehicles,” he says.
Published June 9, 2021
Related Stories
Stories / March 7, 2022
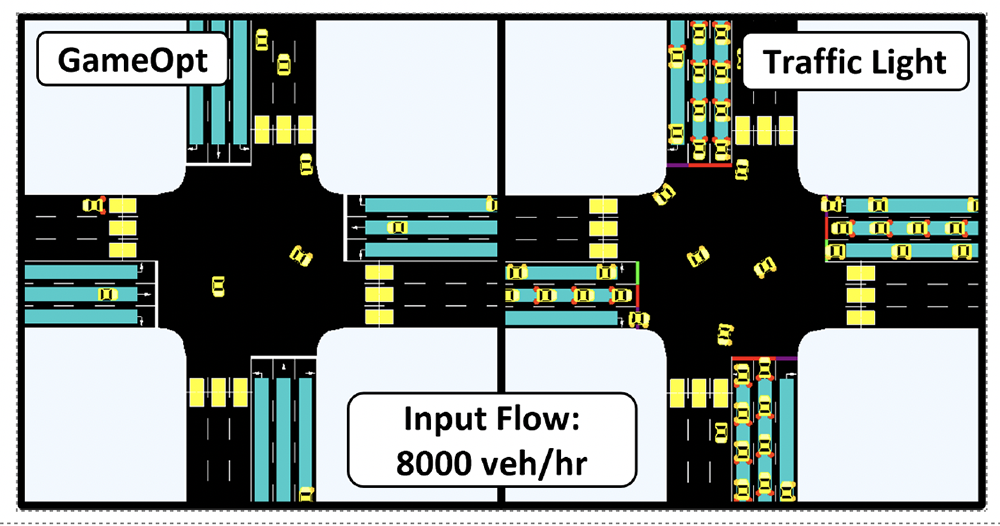
New GAMEOPT framework will help future autonomous vehicles...
Stories / October 7, 2021
Best Student Paper Award for Baras students at ITSC 2021
Stories / March 3, 2020
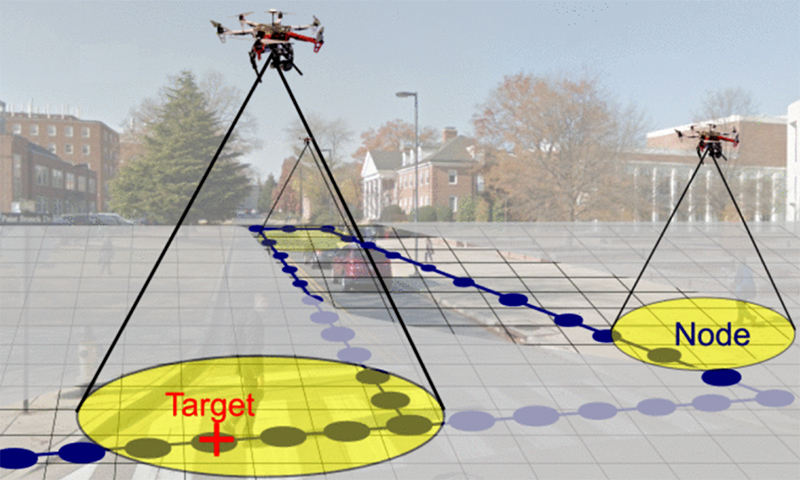
A cooperative control algorithm for robotic search and rescue
Stories / January 5, 2023
ArtIAMAS receives third-year funding of up to $15.1M
Stories / December 8, 2022
Autonomous drones based on bees use AI to work together

Stories / June 21, 2022
Game-theoretic planning for autonomous vehicles
Stories / March 1, 2022
Physical adversarial examples could deceive an autonomous...
Stories / February 4, 2022
Fatemeh Alimardani receives WTS-DC scholarship

Stories / September 21, 2021
Algorithm helps autonomous vehicles navigate common tricky...
Stories / May 26, 2021
UMD, UMBC, ARL Announce Cooperative Agreement to Accelerate AI,...
