News Story
Port-Hamiltonian modeling formalism framework proposed for swarms
Extracting physical laws that govern a given system from data is a central challenge in many diverse areas of science and engineering. Most complex systems can be described as discrete structures (graphs) with dynamical relations. Such networked systems are everywhere, and include multi-body systems, chemical reaction networks, animal and unmanned aerial vehicle (UAV) swarms, and power systems.
One of the fundamental challenges in complex networked systems is to infer the laws of interaction between particles and their dynamical properties. The problem has been approached either by using statistical learning, or by learning the parameters of equations modeling the system. In symbolic equations are generated from the numerically calculated derivatives of the system variables. In the constitutive equations of physical components the system are learned using acausal representations, while in the order of fractional differential equations modeling the system is estimated.
The port-Hamiltonian modeling formalism is a general and powerful geometric framework to model complex dynamical networked systems. Port-Hamiltonian systems are based on a known (Hamiltonian) energy function and the interconnection of atomic structure elements that interact by exchanging energy. In mechanical engineering, such elements include inertias, springs and dampers for mechanical systems They provide an energy-consistent description of a physical system, having the property that a power conservative interconnection of port-Hamiltonian systems is again a port-Hamiltonian system.
In addition, the port-Hamiltonian system framework is particularly suited for finding symmetries and conserved quantities. In particular, it allows to find conserved quantities, in addition to the Hamiltonian, called Casimir functions, by examining conditions related to the port-Hamiltonian system at hand, which can lead to model simplification (reduction). Moreover, finding parameterized symmetries, e.g., Lie groups of transformations, can lead to data generation without experimentation, as well as provide insight on the modeling equations of the system itself.
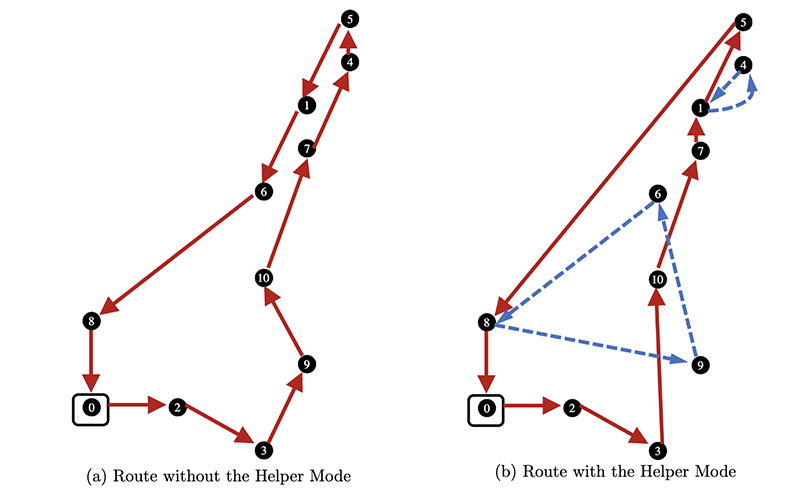
New work by Distinguished University Professor John Baras (ECE/ISR); his former student Ion Matei (EE Ph.D. 2010) with the Palo Alto Research Center (PARC); his current student Christos Mavridis; and Maksym Zhenirovskyy, also with PARC; considers models describing the dynamics of swarms or particle ensembles such as bird flocks. The paper was presented at the 2019 IEEE Conference on Decision and Control.
In Inferring Particle Interaction Physical Models and Their Dynamical Properties, the authors propose a framework based on port-Hamiltonian modeling formalism, aimed at learning interaction models between particles and dynamical properties such as trajectory symmetries and conservation laws of ensembles (or swarms) using large-scale optimization approaches.
The authors build upon the Cucker-Smale particle interaction model, which they represent in a port-Hamiltonian form, and for which they re-discovered the interaction model, and learned the dynamical properties that were previously proved analytically.
Their approach can potentially be used for discovering novel particle interaction rules which can lead to new cooperative control system laws.
Published March 2, 2020
Related Stories
Stories / February 20, 2023
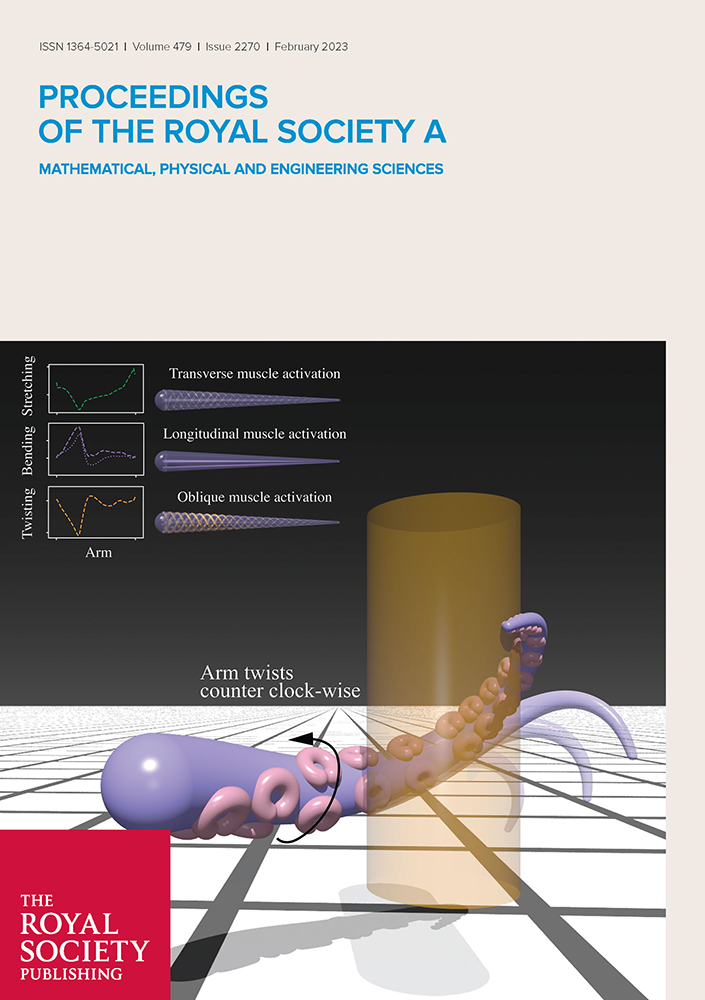
Alumnus Udit Halder’s work published as cover article in...
Stories / July 20, 2022
Alum Shinkyu Park wins 2022 O. Hugo Schuck Award
Stories / November 30, 2023
Martins, Arcak and Park organize 'population games' workshop at...

Stories / November 30, 2023
Workshop honors alum Naomi Leonard

Stories / September 7, 2023
Oct. 13-14: Workshop on New Frontiers in Networked Dynamical...

Stories / July 3, 2023
ECE and ISR alumni feature prominently at American Control...
Stories / June 19, 2023
Alum Sean Andersson named Mechanical Engineering Department...
Stories / March 31, 2023
When does a package delivery company benefit from having two...
Stories / March 2, 2023
Al-Obaid, Adomaitis publish renewable energy algorithm in Royal...
Stories / December 20, 2022
Martins, Kara publish population games research on excess...