News Story
Alum Naomi Leonard is 2023 IEEE Control Systems Award recipient

Aluma Naomi Ehrich Leonard (EE Ph.D. 1994) is the recipient of the 2023 IEEE Control Systems Award “for contributions to applications and theory for control of nonlinear and multiagent systems.”
The IEEE Control Systems Award, established in 1980, is given for outstanding contributions to control systems engineering, science, or technology. Criteria include the seminal nature of the contribution, singular achievement, practical impact, breadth of contributions, depth of contributions, historical precedence, and quality of the nomination.
Leonard is the Edwin S. Wilsey Professor of Mechanical and Aerospace Engineering at Princeton University. Leonard is a MacArthur Fellow, a member of the American Academy of Arts and Sciences, and a Fellow of the ASME, IEEE, IFAC, and SIAM. She previously won the IEEE Control Systems Society's 2017 Hendrik W. Bode Lecture Prize. In 2015, the A. James Clark School of Engineering honored Leonard for her research in the field cooperative control of autonomous vehicles by inducting her into the college’s Innovation Hall of Fame.
At Maryland, Leonard was advised by Professor P. S. Krishnaprasad (ECE/ISR), himself a winner of the IEEE Hendrik W. Bode Lecture Prize.
Leonard was among the first to investigate the simple rules that enable individual agents—whether living organisms or robotic vehicles—to work together in groups by coordinating decision-making, sensing, and motion. In her early work, through the forces of attraction, repulsion and alignment, the agent's responsive rules achieved the desired moving group formation. The group can climb gradients, track level sets in the sampled field, and realize motion patterns that maximize information in sensor measurements when the agents are responding to the environment.
Leonard applied her work to help explain the behaviors observed in animal groups and to design the decision-making behaviors of networks of autonomous vehicles in missions that include environmental monitoring and exploration. She led a multidisciplinary team in an effort to develop adaptive and sustainable ocean observing systems using the coordinated motion of a fleet of autonomous underwater gliders. A month-long field experiment, in Monterey Bay, Calif., provided an unprecedented data set and demonstrated the enormous potential of coordinated control of autonomous vehicles.
Her experiments have produced myriad new theoretical investigations by a large community of academic researchers in engineering, mathematics, physics, and biology on topics ranging from geometric mechanics and control to social decision-making dynamics. She is also inspiring investigation at the intersection of engineering and art, as co-creator of Flock Logic, an art-making project that explores what happens when dancers carry out the rules used to model flocking birds.
Published July 7, 2022
Related Stories
Stories / November 30, 2023
Workshop honors alum Naomi Leonard

Stories / March 8, 2023
The Falcon and the Flock

Stories / December 9, 2021
Alum Nitin Sanket wins Larry S. Davis Doctoral Dissertation...

Stories / April 19, 2023
Chahat Deep Singh's robot bee work featured in BBC video

Stories / February 20, 2023
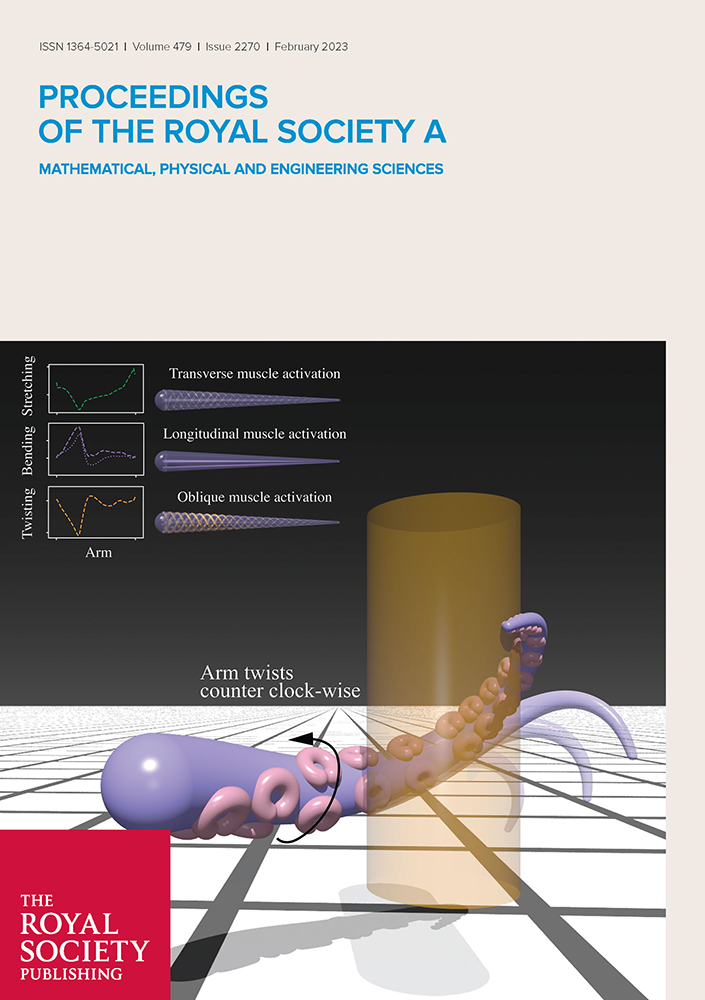
Alumnus Udit Halder’s work published as cover article in...
Stories / January 19, 2023
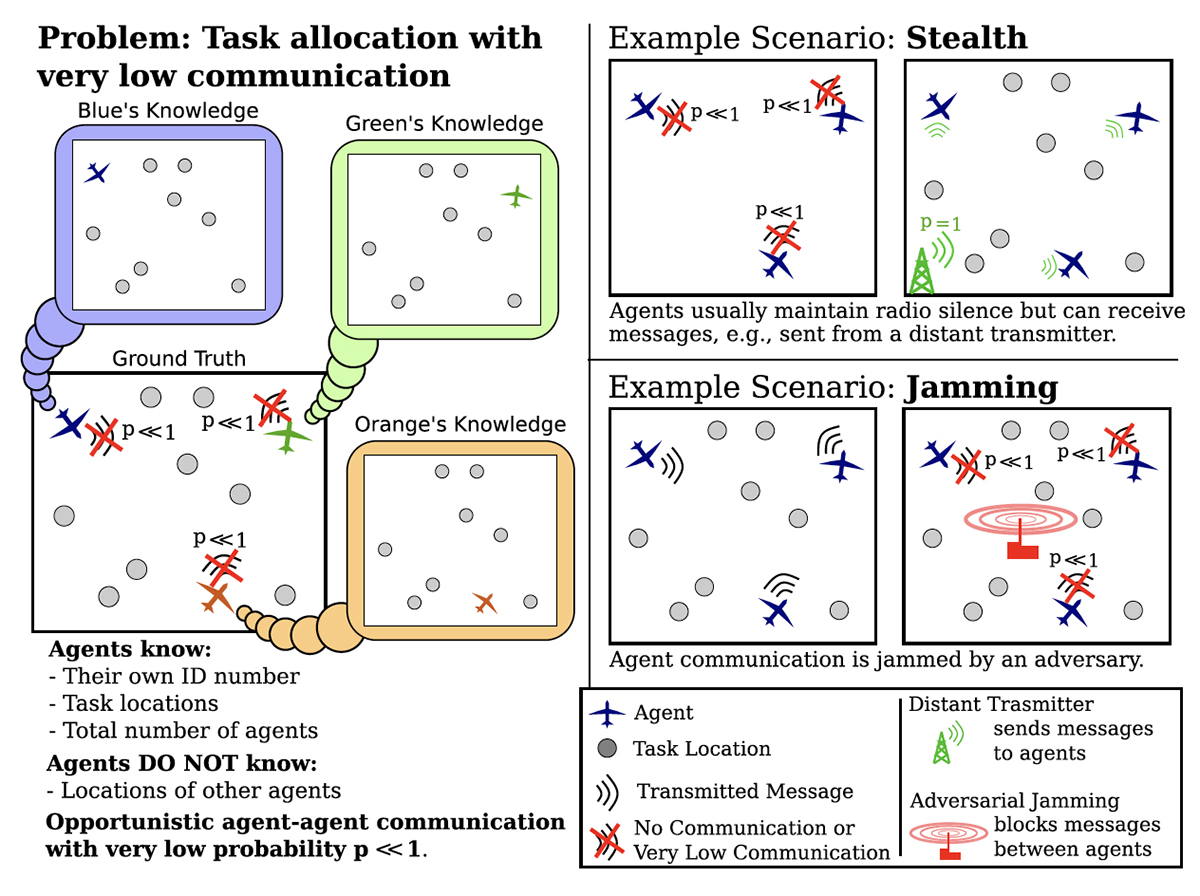
New algorithms for multi-robot systems in low communication...
Stories / December 8, 2022
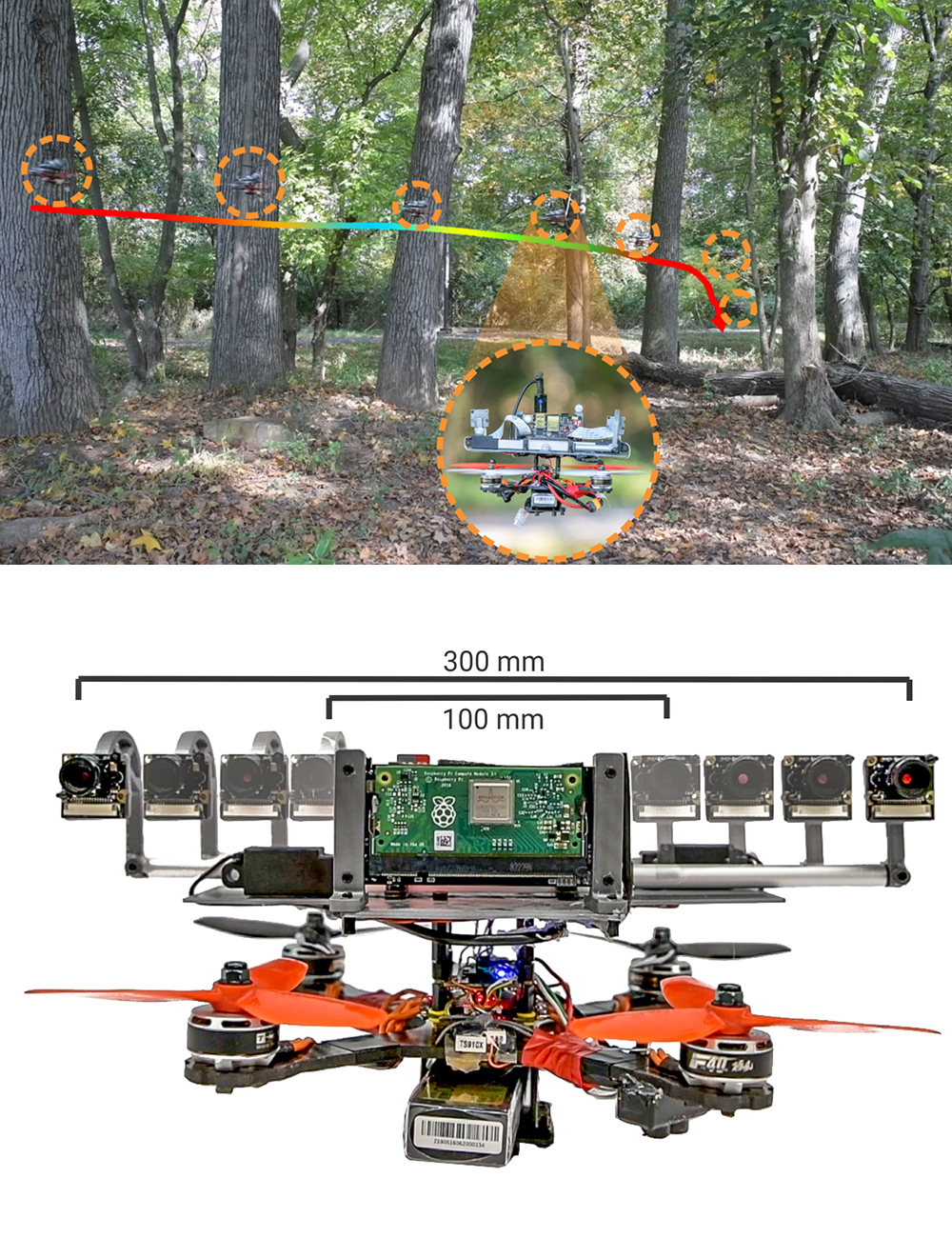
Autonomous drones based on bees use AI to work together

Stories / February 3, 2021
'MorphEyes' stereo camera system improves quadrotor UAV...
Stories / January 3, 2021
Paley receives ONR funding for cross-domain cooperative control

Stories / May 6, 2020
Alumnus Kevin Galloway earns tenure at the U.S. Naval Academy
