News Story
Alum Xiaobo Tan developing robotic fish to 'stalk' real fish in the Great Lakes

ECE/ISR alumnus Xiaobo Tan, an associate professor at Michigan State University, is developing a new robotic fish to “stalk” fish of interest in the Great Lakes.
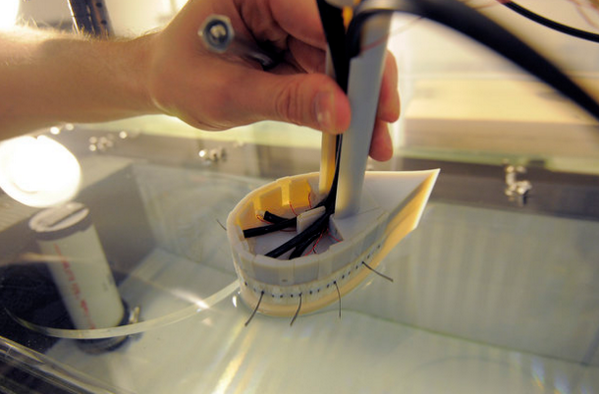
The “Grace” robot, (short for Gliding Robot ACE), is a hybrid of an underwater glider and a robotic fish, and is both energy-efficient and highly maneuverable. It will be equipped with receivers that will detect the presence of fish implanted with acoustic-transmitting tags.
Grace will track the movements of lake trout, walleye and lake sturgeon to identify important habitats, understand why they move from one place to another, and how they are being affected by invasive species such as sea lampreys.
“Basically the robots will form an equivalent of a GPS satellite network underwater, to localize and follow tagged fish in their vicinity,” Tan says.
Tan earned his Ph.D. in Electrical Engineering in 2002 and was advised by Professor John Baras (ECE/ISR) and Professor P. S. Krishnaprasad (ECE/ISR).
Tan is also working with Associate Professor Derek Paley (AE/ISR); Associate Professor Sean Humbert (AE); and Professor Sheryl Coombs of Bowling Green State University on bio-inspired flow sensing and control for autonomous underwater vehicles. The goal is to create an autonomous underwater vehicle that can find stationary objects by changes in water flow, and can also work in groups.
In September, Tan returned to Maryland to give a Maryland Robotics Center Lockheed Martin Robotics Seminar on “(Gliding) Robotic Fish: Swim or Not Swim.” You can watch the video of his presentation here.
| Read the story at the MSU website |
Published September 29, 2014
Related Stories
Stories / March 22, 2018
Alumnus Xiaobo Tan named Withrow Distinguished Scholar at...
Stories / January 27, 2016
Alum Xiaobo Tan named 'Foundation Professor' at Michigan State

Stories / April 7, 2014
Robotic fish research profiled in Baltimore Sun
Stories / July 3, 2023
ECE and ISR alumni feature prominently at American Control...
Stories / August 12, 2021
Measuring the 'suckiness' of invasive sea lampreys

Stories / August 10, 2020
Alum Xiaobo Tan named to Richard M. Hong Endowed Chair at MSU
Stories / November 5, 2018
Alum Nikolaos Sidiropoulos named Louis T. Rader Professor at UVA

Stories / June 22, 2018
Alumna Mingyan Liu named ECE chair at University of Michigan
Stories / March 30, 2018
Alumnus Philip Twu's exciting career in space robotics

Stories / August 30, 2017
Alum Nikos Sidiropoulos named ECE chair at University of...