News Story
EVPropNet finds drones by detecting their propellers
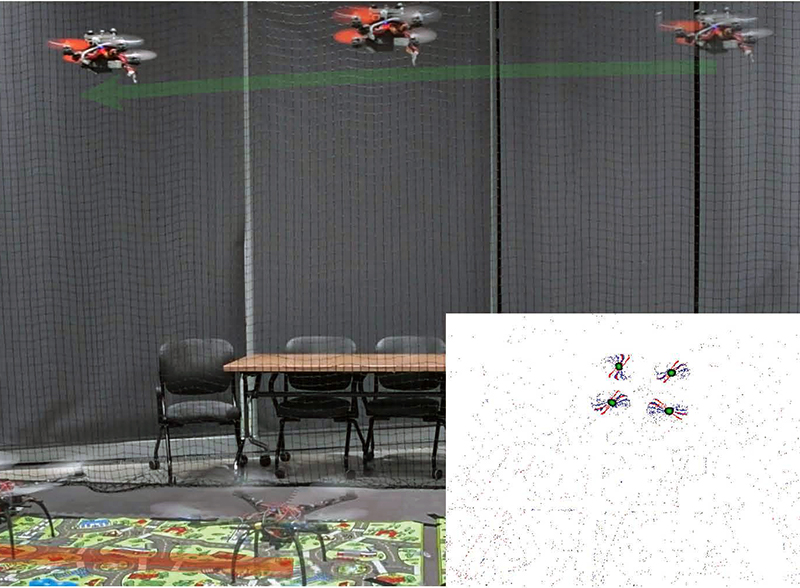
Tracking and following an unmarked quadrotor.
Drones are everywhere—inexpensive to purchase and widely available. While they are incredibly useful, when used maliciously, unmanned aerial vehicles (UAVs) contribute to a new set of security and confidentiality problems. In this age of drones, better ways of detecting their presence are needed.
New work by ISR-affiliated Professor Yiannis Aloimonos (CS/UMIACS) and Associate Research Scientist Cornelia Fermüller (UMIACS); Nitin Sanket; Chahat Deep Singh; Chethan Parameshwara; and Guido C.H.E. de Croon uses the most ubiquitous part of a drone—the propeller—as the basis for a new detection scheme that is 92% accurate.
EVPropNET: Detecting drone by finding propellers for mid-air landing and following was presented at the 2021 Robotics Science and Systems Conference (RSS 2021) in July. The majority of authors are part of the Perception and Robotics Group at the University of Maryland; de Croon is with the Micro Air Vehicle Laboratory at the Delft University of Technology.
Most commercially available or custom-built drones are multi-rotors and are comprised of multiple propellers. Since these propellers rotate at a high-speed, they are generally the fastest moving parts of an image and cannot be directly "seen" by a classical camera without severe motion blur. In their research, the authors utilize event cameras, a class of sensors that are particularly suitable for such scenarios. Event cameras have a high temporal resolution, low-latency, and high dynamic range.
The researchers modeled the geometry of a propeller, then used the model to generate simulated events. These events were then used to train a deep neural network called EVPropNet to detect propellers using an event camera’s data. EVPropNet directly transfers to the real world without any fine-tuning or retraining.
The approach was successfully evaluated and demonstrated in many real-world experiments with drones using different propeller shapes and sizes. In one experiment, EVPropNet was able to track and follow an unmarked drone; in another it was used on a drone to enable it to land on a nearby hovering drone.
The researchers found EVPropNet can detect propellers at a rate of 85.1% even when 60% of the propeller is occluded. It can run at up to 35Hz on a 2W power budget. They believe this is the first deep learning-based solution for detecting propellers to detect drones.
| Learn more at http://prg.cs.umd.edu/EVPropNet | The open source code is available on github |
Published September 3, 2021
Related Stories
Stories / August 14, 2025
New Research Helps Robots Grasp Situational Context

Stories / October 16, 2023
CSRankings places Maryland robotics at #10 in the U.S.

Stories / December 8, 2022
Autonomous drones based on bees use AI to work together

Stories / October 21, 2022
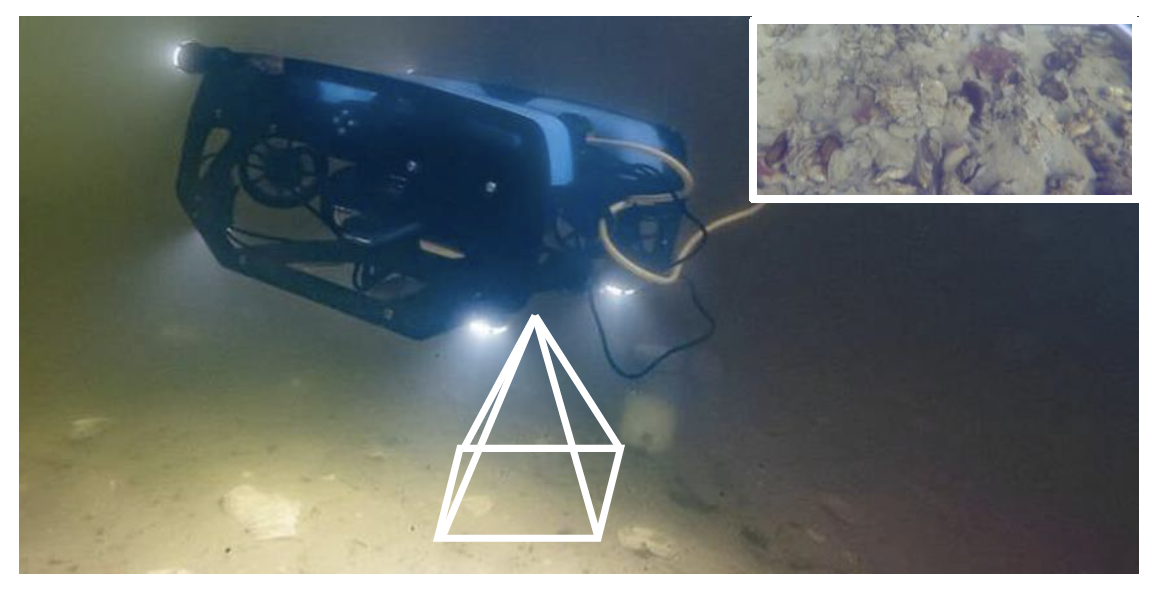
'OysterNet' + underwater robots will aid in accurate oyster...
Stories / August 3, 2022
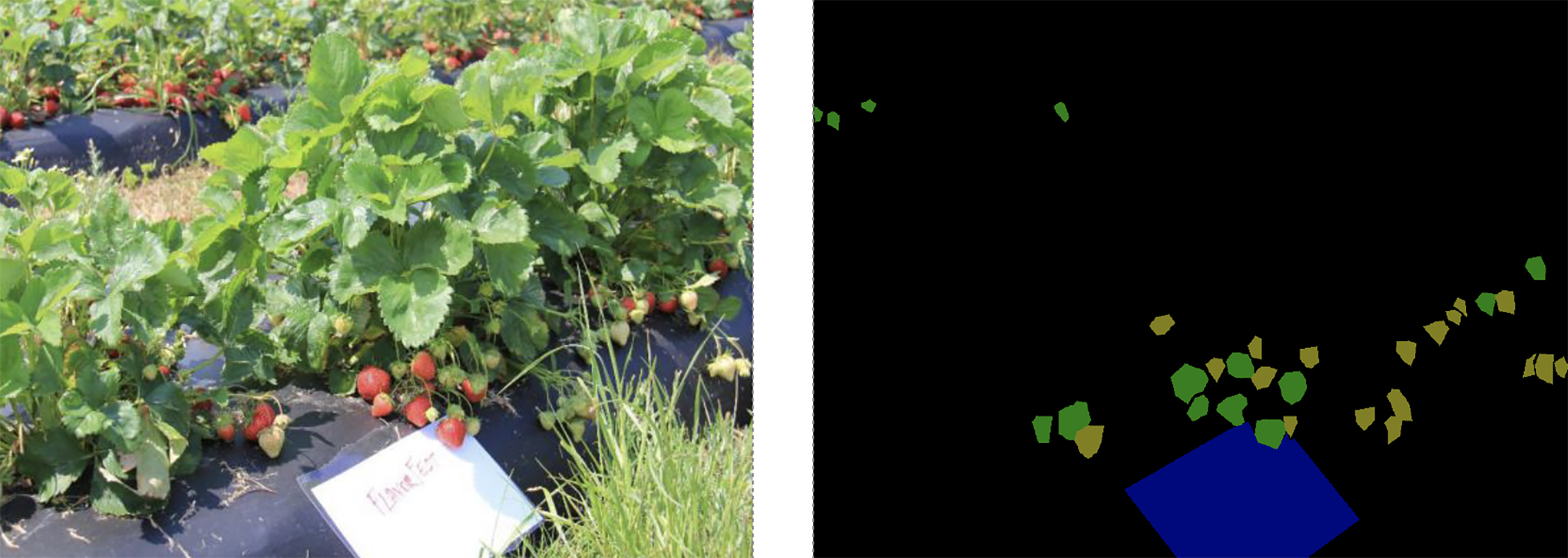
New system uses machine learning to detect ripe strawberries...
Stories / June 11, 2021
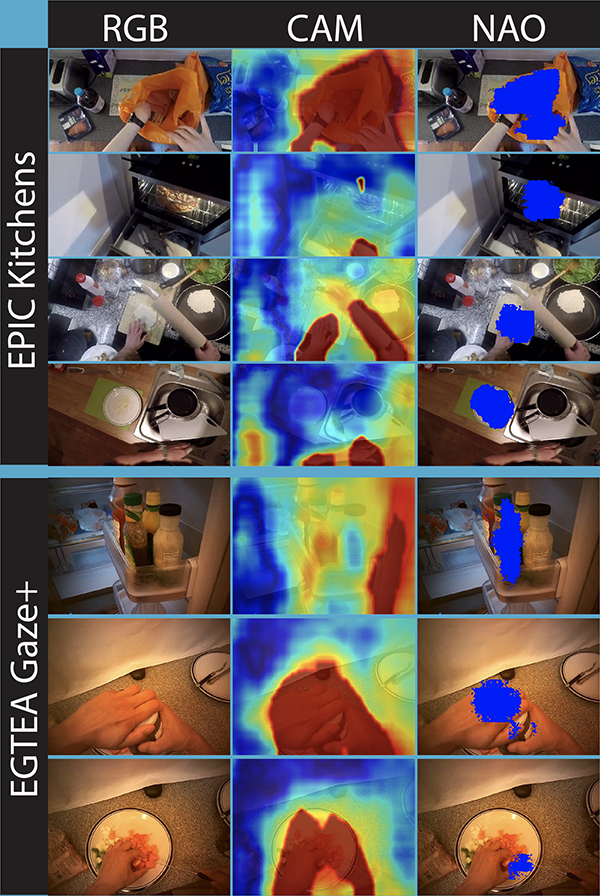
Computer vision advances in contact-centered representations,...
Stories / July 17, 2020
Zampogiannis, Ganguly, Aloimonos and Fermüller author "Vision...
Stories / July 15, 2020
Microrobots soon could be seeing better, say UMD faculty in...

Stories / February 24, 2023
UMD’s SeaDroneSim can generate simulated images and videos to...
Stories / February 18, 2023
Seven UMD Grand Challenges projects include ISR and MRC faculty
