News Story
Gupta is PI for NSF NRI unmanned surface vehicle grant
Professor S.K. Gupta (ME/ISR) is the principal investigator for a three-year, $526K National Science Foundation National Robotics Initiative Collaborative Research grant, “ Enabling Risk-Aware Decision Making in Human-Guided Unmanned Surface Vehicle Teams.”
Over the last ten years, substantial progress has been made in the development of small low-cost unmanned surface vehicles (USVs). There are a number of civilian applications where deploying a human-robot team consisting of several small USVs and one or more human supervisors can significantly reduce costs, improve safety, and increase operational efficiencies. Representative applications include remote/persistent ocean sensing, marine search and rescue, maritime operations in congested port environments, and industrial offshore supply and support. USVs face unique challenges that are not experienced by robots operating indoors, such as: the need to adhere to marine navigation rules (COLREGs); local current, wave and wind conditions that can severely reduce the dynamic range of sensors and actuators; frequent communication interruptions; and risk and urgency due to rapidly changing situations during outdoor on-water operations. This research aims to develop decision making foundations for enabling teams of humans and USVs to perform complex collaborative tasks. Advances in this area could be extremely important from both a regulatory and practical standpoint for the future deployment of USV systems. Results from this research will enable leveraging the tremendous potential of USVs by reducing the cost of deployment and operational risks in civilian applications.
The research will make advances in risk-informed decision making so that teams of USVs and human supervisors can work cooperatively on a wide variety of missions. The proposed work will develop a comprehensive distributed decision making approach by leveraging the latest advances in task coordination and assignment, planning, reactive behaviors, and control to enable the deployment of human-guided USV teams in civilian applications. Progress in these constituent components will be pursued to ensure that they are consistent with each other and to explicitly account for risk during decision making. This research will develop methodologies to model team missions to ensure that all phases of decision making will have the required information for making informed decisions. Decision making methodologies will be developed for sparse advisory control of USV teams to mitigate risks and for coordinating and assigning tasks to different USVs in the team. Algorithms will also be developed for risk-aware deliberative trajectory planning and generating and executing reactive behaviors for mitigating risks. The methods developed will be validated through on-water field experiments.
Published September 1, 2015
Related Stories
Stories / June 21, 2022
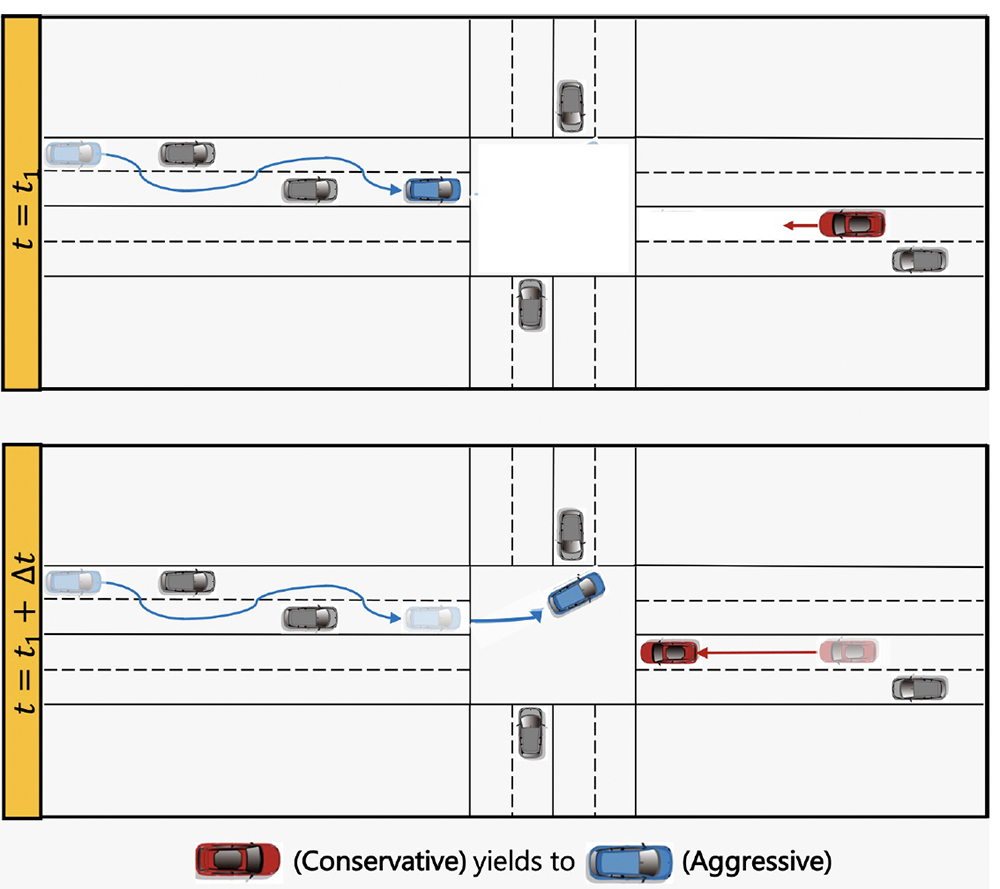
Game-theoretic planning for autonomous vehicles
Stories / December 16, 2016
S.K. Gupta leads finalist group in KUKA Innovation competition

Stories / September 8, 2015
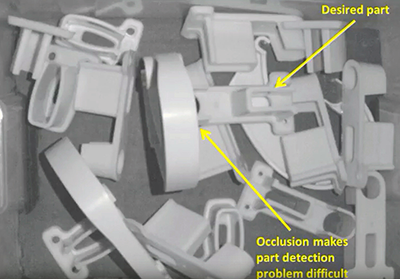
Building a smarter industrial robot
Stories / September 1, 2015
S.K. Gupta wins NSF grant for human robot collaboration in...

Stories / July 6, 2015
Alum Ashis Banerjee joining University of Washington faculty

Stories / April 9, 2015
New book by Jeffrey Herrmann: Engineering Decision Making and...
Stories / January 15, 2015
Michael Fu wins NSF grant for simulation-based optimal decision...
Stories / August 10, 2014
Students present final projects for 2014 NSF Microrobotics REU
Stories / May 21, 2014
Greg Krummel wins Outstanding Research Award for Robo Crab
Stories / April 7, 2014
S.K. Gupta interviewed for robotics story in The Economist