News Story
Maryland students place third in autonomous drone race

The Maryland Paratroopers pose for a photo in Madrid after their third place finish. L-R: MSSE student Rohit Nambiar; visiting AE grad student Vincenz Frenzel; advisor Dr. Huan “Mumu” Xu (AE/ISR); senior AE/CS undergrad student Mathew Vaughn; AE MS grad student Derek Thompson.
An interdisciplinary team of both undergraduate and graduate students affiliated with the Maryland Robotics Center took third place in the autonomous drone racing event at the prestigious 2018 IEEE International Conference on Intelligent Robots and Systems (IROS) in Madrid on Oct. 3. IROS is the largest and arguably most important robotics research conference in the world.
The “Maryland Paratroopers” team made it through the course in about 90 seconds, placing ahead of teams from Mexico, the Netherlands, Spain, and Korea. The winning team, which completed the course in 31.78 seconds, hailed from the University of Zurich.

The team, which was competing in the event for the first time, included Master of Science in Systems Engineering student Rohit Nambiar; visiting Aerospace Engineering graduate student Vincenz Frenzel; senior Aerospace Engineering and Computer Science undergraduate student Mathew Vaughn; and Aerospace Engineering MS student Derek Thompson. Assistant Professor Huan “Mumu” Xu (AE/ISR) advised the team, which received support from the Brin Family Prize and the Maryland Robotics Center.
Competitive autonomous drone racing is an engineering and computer science challenge that requires an understanding of computer vision, the ability to develop algorithms that incorporate the gate detection, and programming logic for the drone to understand when it has completed tasks. Team members do not fly the drones themselves; they must program them to navigate the course on their own, flying through a series of gates, recognizing opportunities and avoiding obstacles. The objective is to complete the course in the fastest time possible.
In Madrid, the competition course consisted of eight challenging gates, whose location could change during any run. Gate number six was a "jungle gym" that required the drone to detect which "quadrant" was active and only fly through that one. Gate number seven had a rotating arm the drone had to avoid while it passed through.
For the IROS competition, teams could choose whatever drone/sensors combination they wished, as long as the machine could fly through the gates. “We—and a lot of other teams—chose the Parrot Bebop because it is very stable and can fly out of the box,” Xu says. “So instead of focusing on getting sensors integrated and working, you can start developing code and algorithms.”
“Everyone worked on everything,” Xu says. “There were some tasks that one student may have taken ownership of, but in the last month before the competition it was testing, debugging, and coding for everyone.”
The Maryland team got started because of Xu’s research interests in autonomous systems. “I have been working with some undergraduates who drone race as a hobby,” Xu says. “Last year I was searching for something that combined autonomous systems with drones. That’s when I stumbled upon the IROS autonomous drone racing competition.”
“This was the first year we ever competed, and our goal was to come in and finish the course,” she noted. “We gained a lot of experience, and learned a lot from the other teams, for example, do's and don'ts in hardware and software choices and platforms. Next year, we're hoping to build off of this knowledge.”
“We never really focused on speed. That definitely changes next year.”
Published October 9, 2018
Related Stories
Stories / November 6, 2019
Student autonomous drone racing team takes 2nd place at IROS

Stories / August 14, 2025
New Research Helps Robots Grasp Situational Context

Stories / October 16, 2023
CSRankings places Maryland robotics at #10 in the U.S.

Stories / May 15, 2023
“Gambit” Pays Off in UMD Team’s Search-and-Rescue...
Stories / February 24, 2023
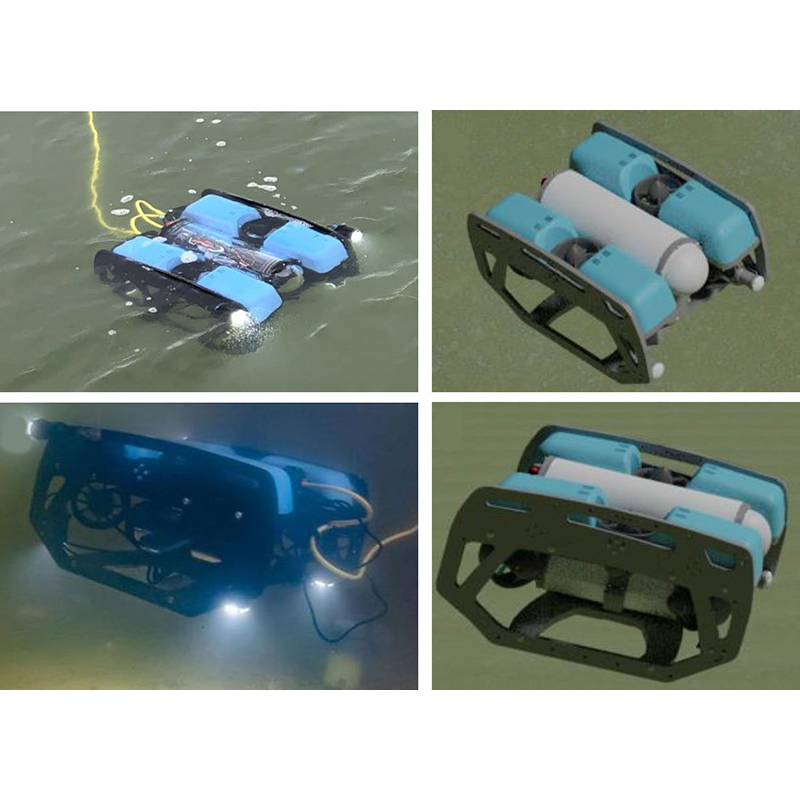
UMD’s SeaDroneSim can generate simulated images and videos to...
Stories / February 8, 2023
Levi Burner named a Future Faculty Fellow
Stories / January 5, 2023
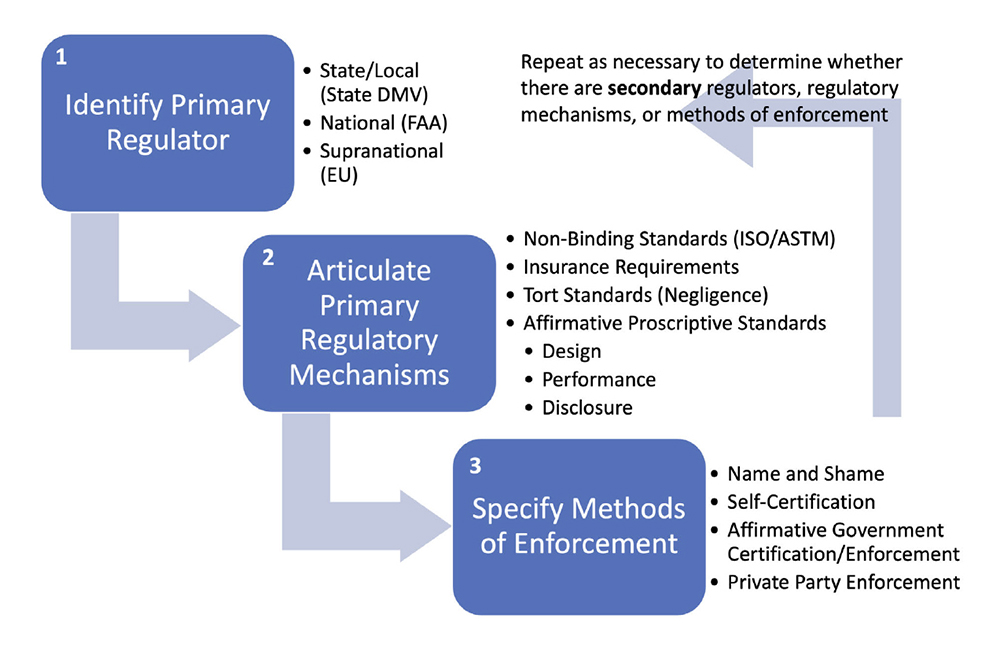
Work on the future of regulating autonomous systems published...
Stories / December 22, 2022
Aloimonos, Sandini contribute chapter to MIT Press book,...
Stories / December 8, 2022
Autonomous drones based on bees use AI to work together

Stories / October 21, 2022
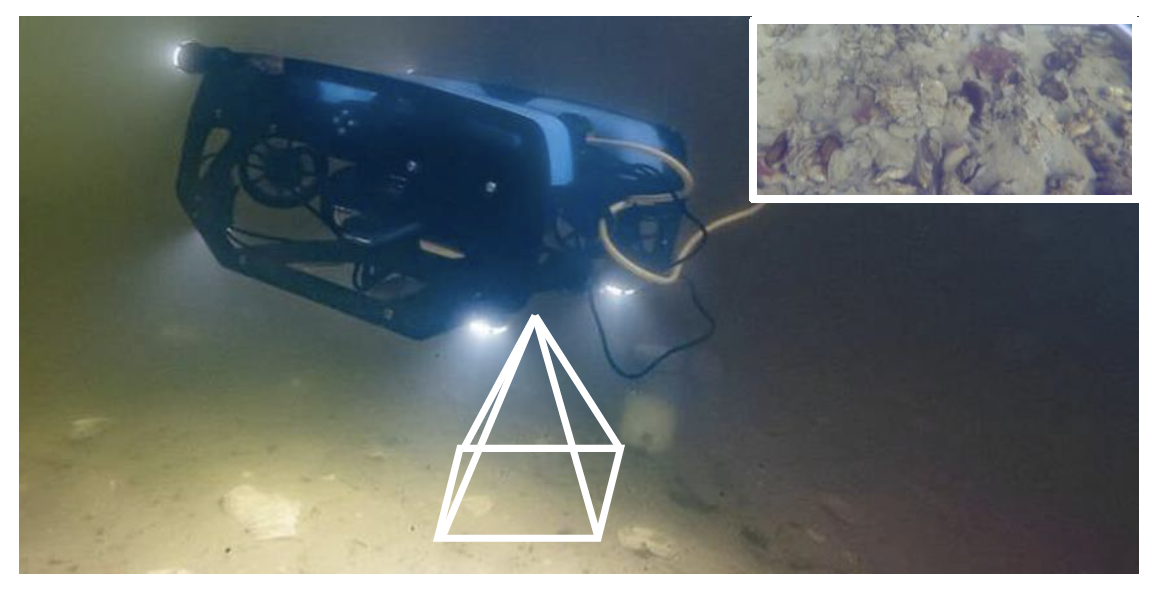
'OysterNet' + underwater robots will aid in accurate oyster...