News Story
MRC Faculty and Researchers to Present 16 Papers at International Robotics Conference - IROS 2020
International Conference on Intelligent Robots and Systems - From 25 October 2020 until 29 November 2020
The virtual 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) brings together robotics experts from across the globe for a month of paper presentations, invited speakers, workshops, and forums. IROS is a premier flagship academic conference in robotics.
The theme for this year is “Consumer Robots and Our Future” showcasing the cutting edge research in all areas of robotics.
A total of 16 papers will be presented by MRC faculty and researchers.
The conference is free to access with presentations and workshops on demand providing attendees to view the research they desire at any time.
MRC IROS 2020 papers:
Enhanced Transfer Learning for Autonomous Driving with Systematic Accident Simulation
Shivam Akhauri, Laura Zheng, and Ming Lin
Unsupervised Learning of Dense Optical Flow, Depth and Egomotion with Event-Based Sensors
Chengxi Ye, Anton Mitrokhin, Cornelia Fermuller, James Yorke, and Yiannis Aloimonos
Forecasting Trajectory and Behavior of Road-Agents Using Spectral Clustering in Graph-LSTMs
Rohan Chandra, Tianrui Guan, Srujan Panuganti, Trisha Mittal, Uttaran Bhattacharya, Aniket Bera, and Dinesh Manocha
DeepMNavigate: Deep Reinforced Multi-Robot Navigation Unifying Local & Global Collision Avoidance
Qingyang Tan, Tingxiang Fan, Jia Pan, and Dinesh Manocha
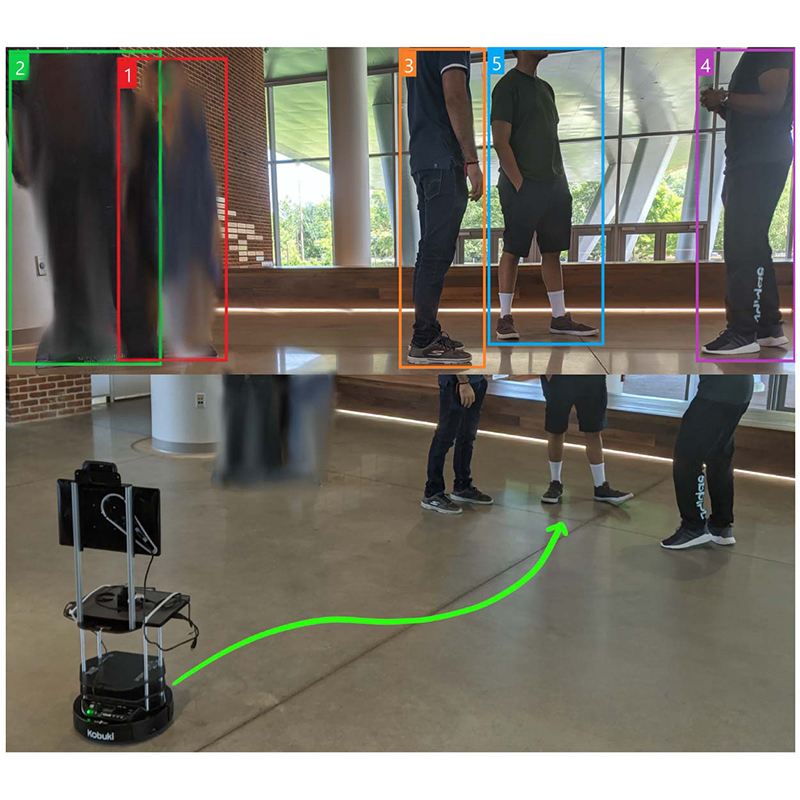
Frozone: Freezing-Free, Pedestrian-Friendly Navigation in Human Crowds
Adarsh Jagan Sathyamoorthy, Utsav Patel, Tianrui Guan, and Dinesh Manocha
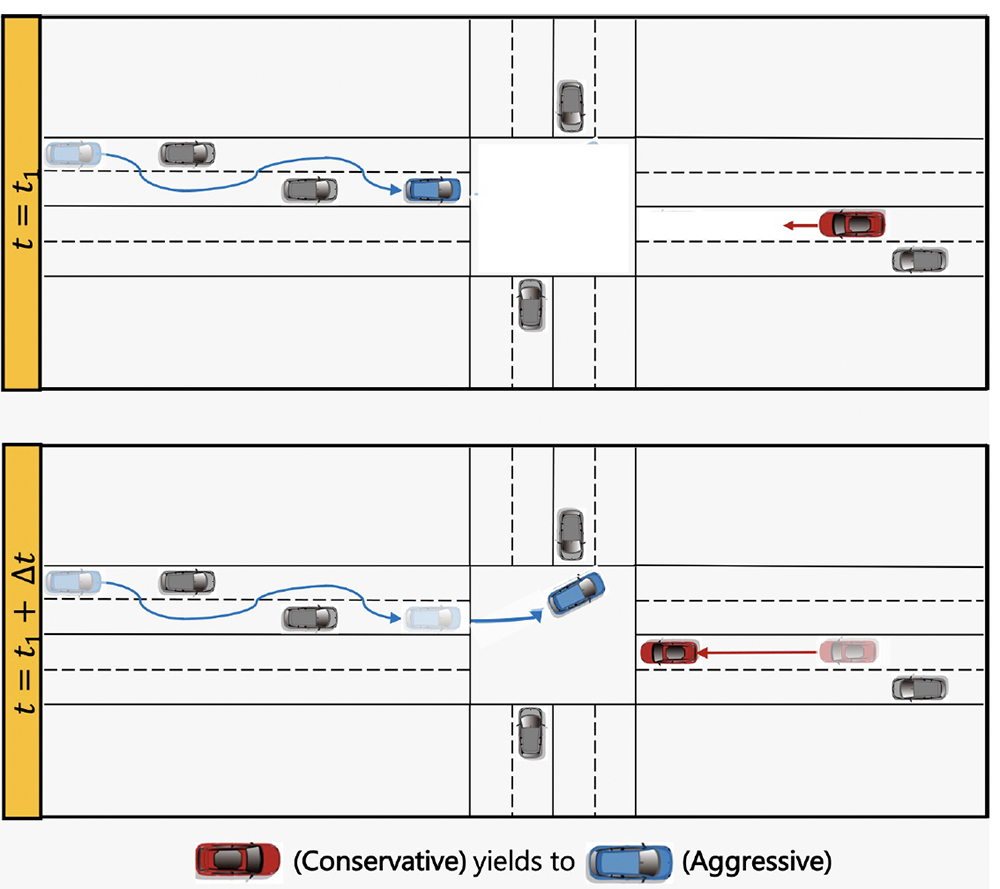
CMetric: A Driving Behavior Measure Using Centrality Functions
Rohan Chandra, Uttaran Bhattacharya, Trisha Mittal, Aniket Bera, and Dinesh Manocha
New Formulation of Mixed-Integer Conic Programming for Globally Optimal Grasp Planning
Min Liu, Zherong Pan, Kai Xu, and Dinesh Manocha
ProxEmo: Gait-Based Emotion Learning andMulti-View Proxemic Fusion for Socially-Aware Robot Navigation
Venkatraman Narayanan, Bala Murali Manoghar, Vishnu Sashank Dorbala, Dinesh Manocha, and Aniket Bera
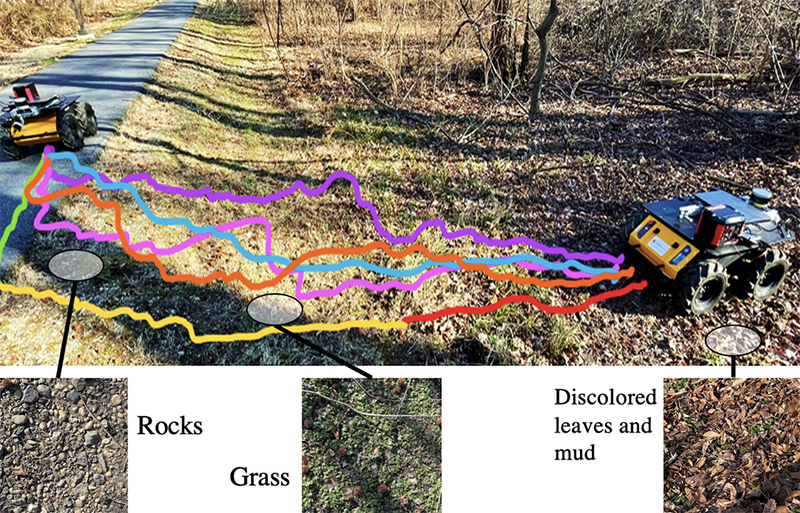
Risk-Aware Planning and Assignment for Ground Vehicles using Uncertain Perception from Aerial Vehicles
Vishnu Sharma, Maymoonah Toubeh, Lifeng Zhou, and Pratap Tokekar
Multi-Robot Coordinated Planning in Confined Environments under Kinematic Constraints
Clayton Mangette and Pratap Tokekar
Crop Height and Plot Estimation for Phenotyping from Unmanned Aerial Vehicles using 3D LiDAR
Harnaik Dhami, Kevin Yu, Tianshu Xu, Qian Zhu, Kshitiz Dhakal, James Friel, Song Li, and Pratap Tokekar
3D Printed Bio-Inspired Hair Sensor for Directional Airflow Sensing
Keshav Rajasekaran, Hyung Dae Bae, Sarah Bergbreiter, and Miao Yu
A Human-Robot Interface based on Surface Electroencephalographic Sensors
Christos N. Mavridis, John S. Baras, and Kostas J. Kyriakopoulos
Towards Autonomous Control of Magnetic Suture Needles
Matthew Fan, Xiaolong Liu, Kamakshi Jain, Daniel Lerner, Lamar Mair, Weinberg Irving, Yancy Diaz-Mercado, and Axel Krieger
Operational Space Formulation and Inverse Kinematics for an Arm Exoskeleton with Scapula Rotation
Craig Carignan, Daniil Gribok, Tuvia Rappaport, and Natalie Condzal
Communication Maintenance of Robotic Parasitic Antenna Arrays
Jeffrey Twigg, Nikhil Chopra, and Brian M. Sadler
Published October 28, 2020
Related Stories
Stories / March 8, 2023
The Falcon and the Flock

Stories / June 22, 2022
Helping robots navigate to a target, around obstacles and...

Stories / June 21, 2022
Game-theoretic planning for autonomous vehicles
Stories / April 20, 2022
Which way should I go?
Stories / February 14, 2022
Chahat Deep Singh named a Future Faculty Fellow

Stories / December 8, 2021
GAMMA group publishes 'COVID robot' research in PLOS One
Stories / May 21, 2021
UMD Researchers to Have a Strong Showing at ICRA 2021

Stories / November 28, 2023
Diving Deeper into Competition, and Recruitment

Stories / September 1, 2023
UMD Student Team Lauded for Award-Winning Drone

Stories / August 28, 2023
Yu Named Elkins Professor
