News Story
Which way should I go?
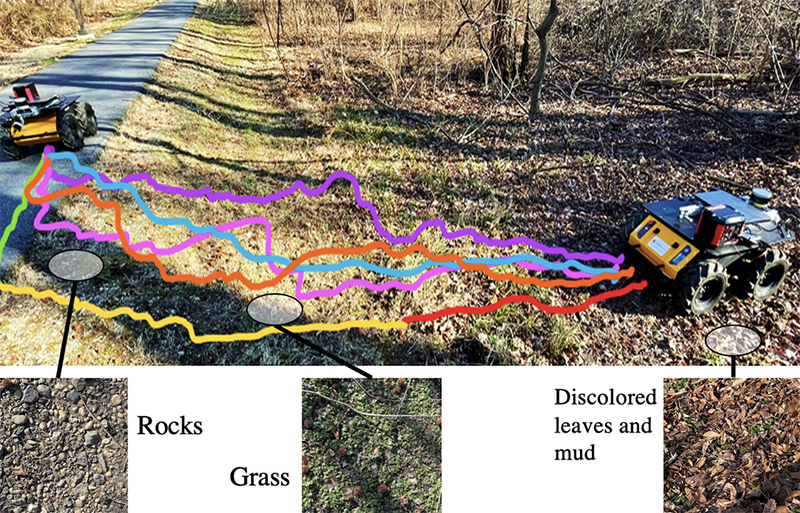
Fig. 1 from the paper. The trajectories of the new method, TerraPN (green, yellow, red corresponding to fast, intermediate and slow speeds respectively), versus previous methods: DWA [11] (blue), TERP [1] (orange), OCRNet-based (pink), and PSPNet-based (purple) navigation schemes in unstructured terrain. TerraPN’s trajectories navigate the robot on smooth surfaces (asphalt) as much as possible with high velocities and adapt the velocity to different surfaces based on their navigability costs. Other methods directly drive the robot towards its goal with its maximum velocity. In some cases (PSPNet-based), the trajectories are wandering since the segmentation falters when the surface becomes too unstructured.
Autonomous robots are currently being used for food and grocery delivery, agriculture, surveillance, and planetary exploration. A robot’s ability to navigate depends in part on the geometry and surface properties of the terrain it encounters. For example, a surface’s texture influences the kind of traction the robot will be able to attain, while its bumpiness determines the vibrations the robot experiences. Whether or not a robot might get stuck in sand or mud depends on a terrain property called “deformability.” That’s why being able to both perceive and learn about surface properties is important for robots’ smooth navigation.
Recently, advances in computer vision and other areas have made better terrain navigation possible. Now, a team of students and faculty in the University of Maryland’s GAMMA Lab has developed a new way for autonomous robots to improve their navigating abilities by learning the surface characteristics of complex outdoor terrains. TerraPN: Unstructured terrain navigation through Online Self-Supervised Learning was developed by Adarsh Jagan Sathyamoorthy, Kasun Weerakoon, Tianrui Guan, Jing Liang and ISR-affiliated Professor Dinesh Manocha (CS/ECE/UMIACS).
TerraPN is a computationally light, online, self-supervised, learning-based method to compute a surface navigability cost map. It trains a neural network to learn a terrain’s surface properties, then computes a robot-specific 2D navigability cost map for the terrain. The method uses RGB image patches cropped from a full-sized image and the robot’s velocities as inputs, and processed 6-DOF IMU measurements and odometry errors as labels. The predicted cost map is a concatenation of n×n patches of costs corresponding to different input RGB patches.
TerraPN learns to predict navigability costs in approximately 20 minutes for five different surfaces, compared to 3-4 hours for previous scene segmentation methods. This decreases inference time. TerraPN also outperforms previous works in terms of vibration costs and generates robot velocities suitable for different surfaces.
TerraPN includes a new extension to the Dynamic-Window Approach (DWA-O) that accounts for a surface’s navigability cost while computing robot trajectories. DWA-O also computes velocities with low surface navigability cost for the robot. This leads to smoother trajectories and a reduction in the vibration cost the robot experiences.
More information is available at the GAMMA Lab website. A video demonstrating TerraPN is also available.
Published April 20, 2022
Related Stories
Stories / February 14, 2022
Chahat Deep Singh named a Future Faculty Fellow

Stories / March 12, 2020
New model predictive control framework improves reactive...

Stories / March 8, 2023
The Falcon and the Flock

Stories / December 22, 2022
Aloimonos, Sandini contribute chapter to MIT Press book,...
Stories / December 8, 2022
Autonomous drones based on bees use AI to work together

Stories / August 3, 2022
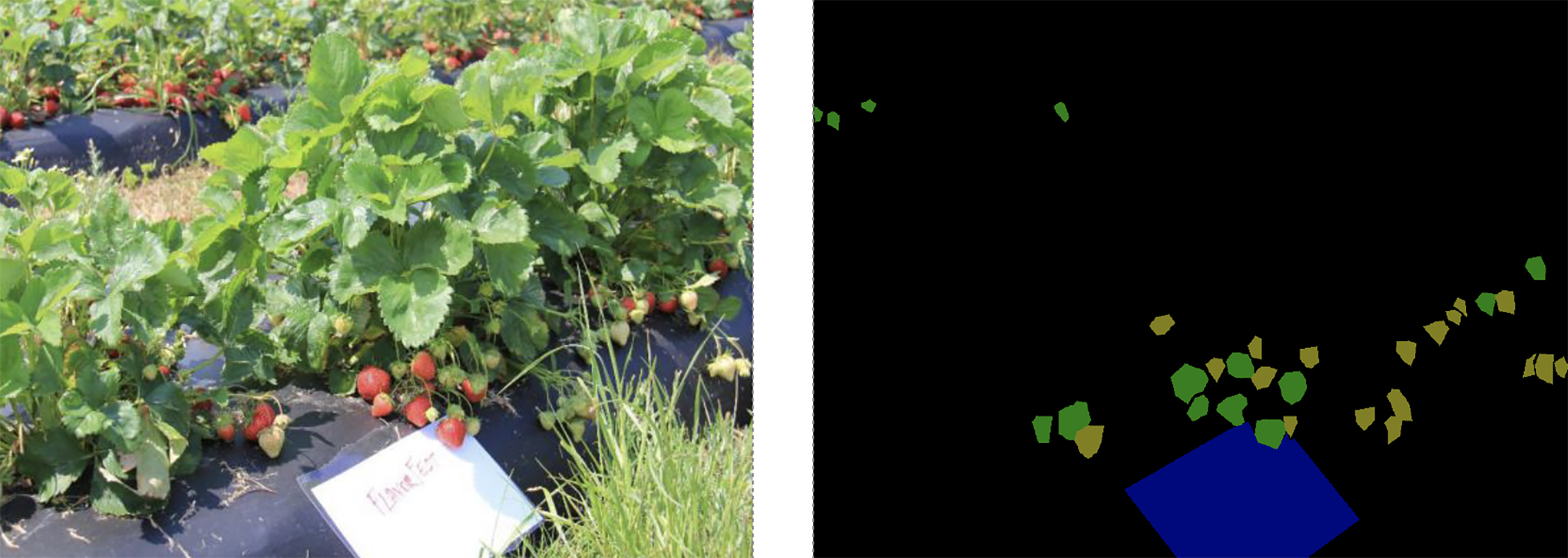
New system uses machine learning to detect ripe strawberries...
Stories / June 22, 2022
Helping robots navigate to a target, around obstacles and...

Stories / June 21, 2022
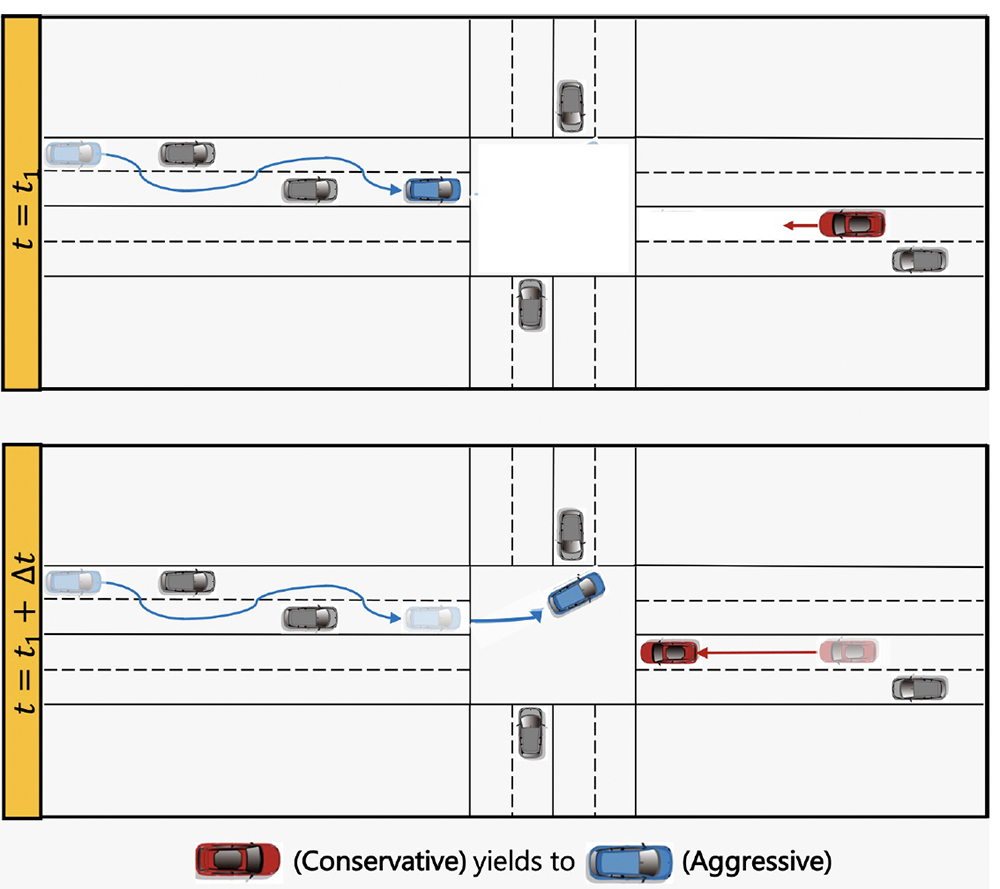
Game-theoretic planning for autonomous vehicles
Stories / August 3, 2021
Bee drones featured on new Voice of America video
Stories / July 21, 2021
Perception and Robotics Group creates hive of ideas for drones
