News Story
New book by Jeffrey Herrmann: Metareasoning for Robots
Professor Jeffrey Herrmann (ME/ISR) has written a new book that introduces key systems engineering concepts and design options for metareasoning to make robots smarter. Metareasoning for Robots: Adapting in Dynamic and Uncertain Environments is published by Springer and is part of its Synthesis Lectures on Computer Science series.
This state-of-the-art resource will be useful to robotics researchers and engineers. The comprehensive introduction to metareasoning includes a section on how to select an appropriate metareasoning approach, as well as how to synthesize metareasoning policies.
Herrmann's systems engineering perspective suggests metareasoning is an approach that can improve the overall robot or autonomous system, not just one component or subsystem.
In addition to introducing key concepts, Herrmann discusses design options for metareasoning approaches and policies, and presents approaches for policy testing and evaluation. Every chapter has references to valuable works on robotics and metareasoning, and the book uses examples from the author’s own research and other research groups to illustrate these ideas. In addition, the book provides links to books and papers for readers who wish to investigate these topics further.
Chapters
Introduction to Metareasoning
Metareasoning Design Options
Implementing Metareasoning
Synthesizing Metareasoning Policies
Testing Metareasoning Policies
Published May 16, 2023
Related Stories
Stories / March 8, 2023
The Falcon and the Flock

Stories / December 22, 2022
Aloimonos, Sandini contribute chapter to MIT Press book,...
Stories / August 3, 2022
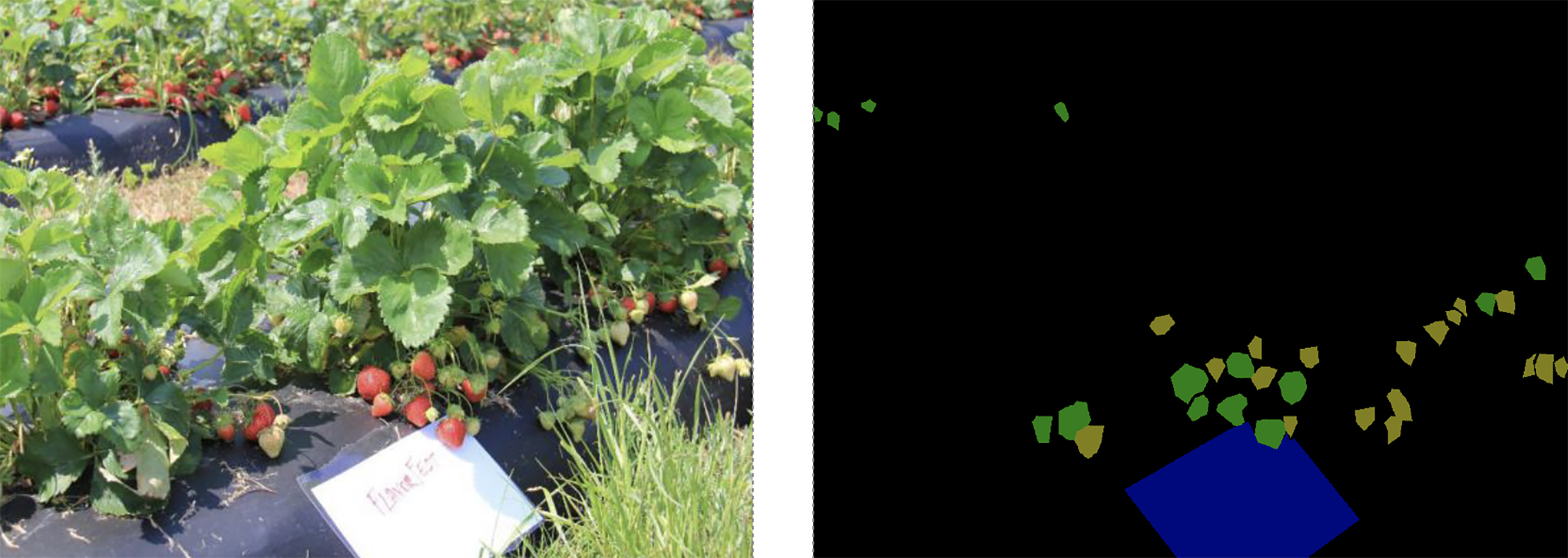
New system uses machine learning to detect ripe strawberries...
Stories / June 22, 2022
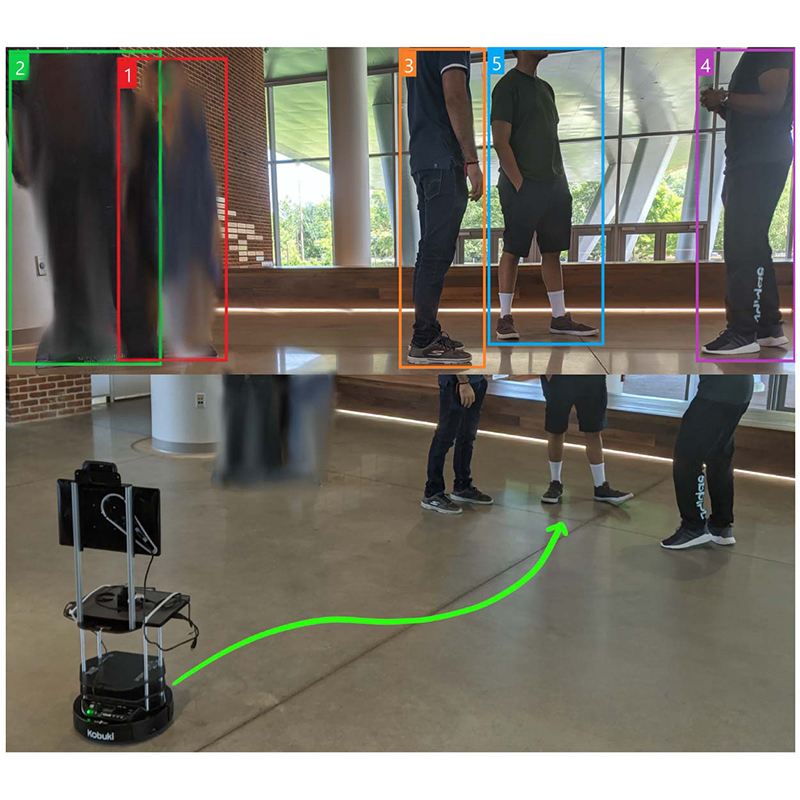
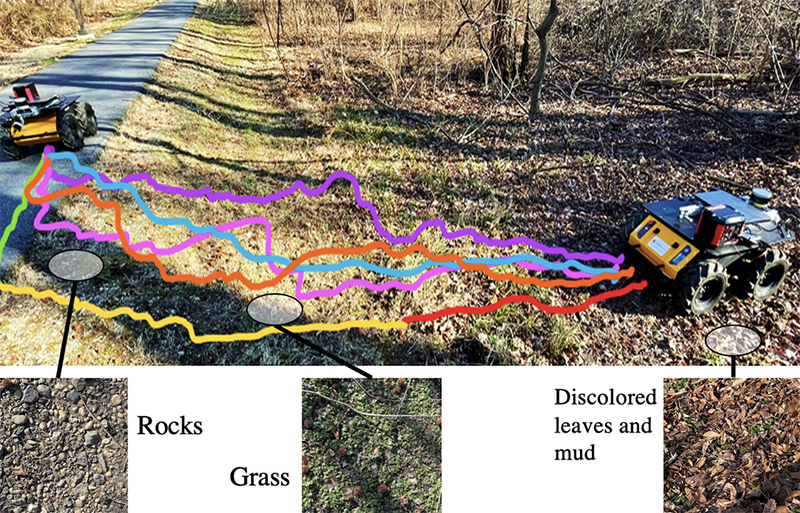
Helping robots navigate to a target, around obstacles and...

Stories / June 21, 2022
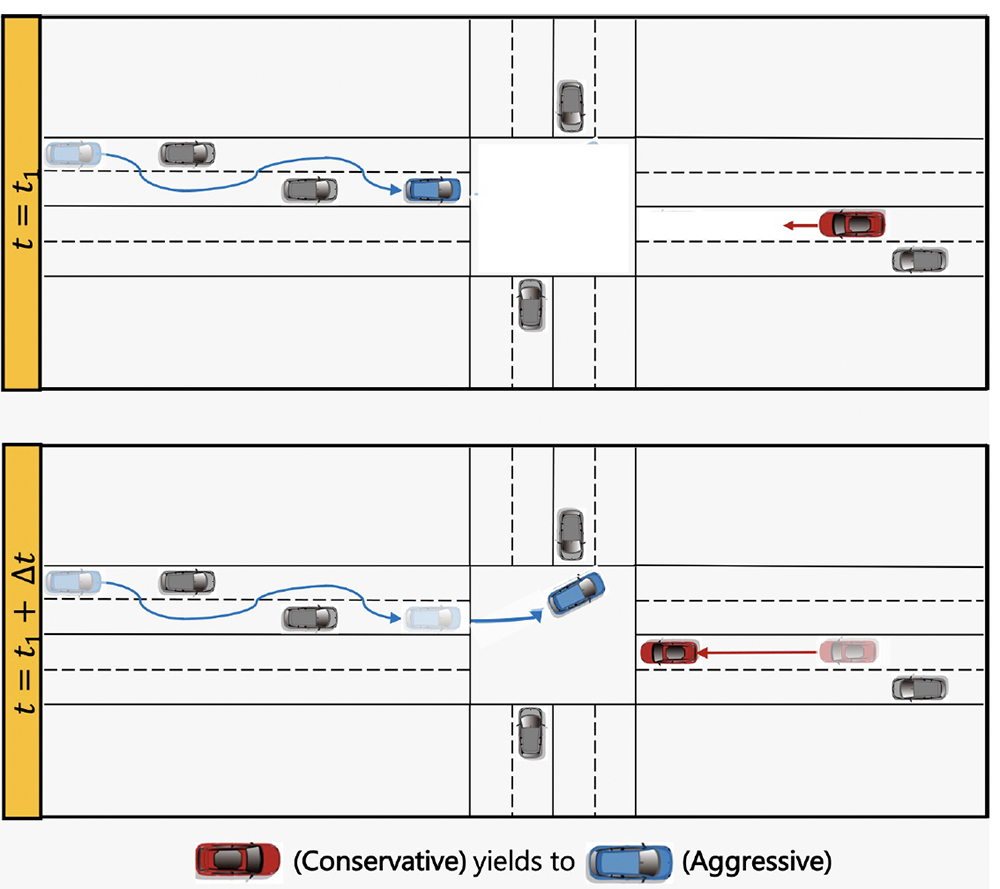
Game-theoretic planning for autonomous vehicles
Stories / April 20, 2022
Which way should I go?
Stories / April 2, 2022
ASTrA project to provide new tools for power generation,...

Stories / February 14, 2022
Chahat Deep Singh named a Future Faculty Fellow

Stories / February 7, 2022
MRC and MAGE Earn ARM Institute Endorsement

Stories / December 8, 2021
GAMMA group publishes 'COVID robot' research in PLOS One